Hierarchical Growing Neural Gas Network (HGNG)-Based Semicooperative Feature Classifier for IDS in Vehicular Ad Hoc Network (VANET)


Abstract
:1. Introduction
- It is not possible to use IDS in a wired network because of its wireless and mobile nature and its dynamic topology.
- Unlike wired networks (some of these known databases, such as NSL-KDD and KDD 99), there is no universally accepted database available for VANET. Which means IDS can only work with locally monitored data in VANET.
- Because VANET is a highly dynamic network and the attacked time will be very short, the receiving information of the vehicle must be verified and responded quickly. In other words, the veracity and reliability of vehicle messages must be able to be determined quickly and accurately in VANET [16].
- Although IDS is a reliable way to protect VANET, it is difficult to solve extra inspection time and loads with the increasing number of vehicles.
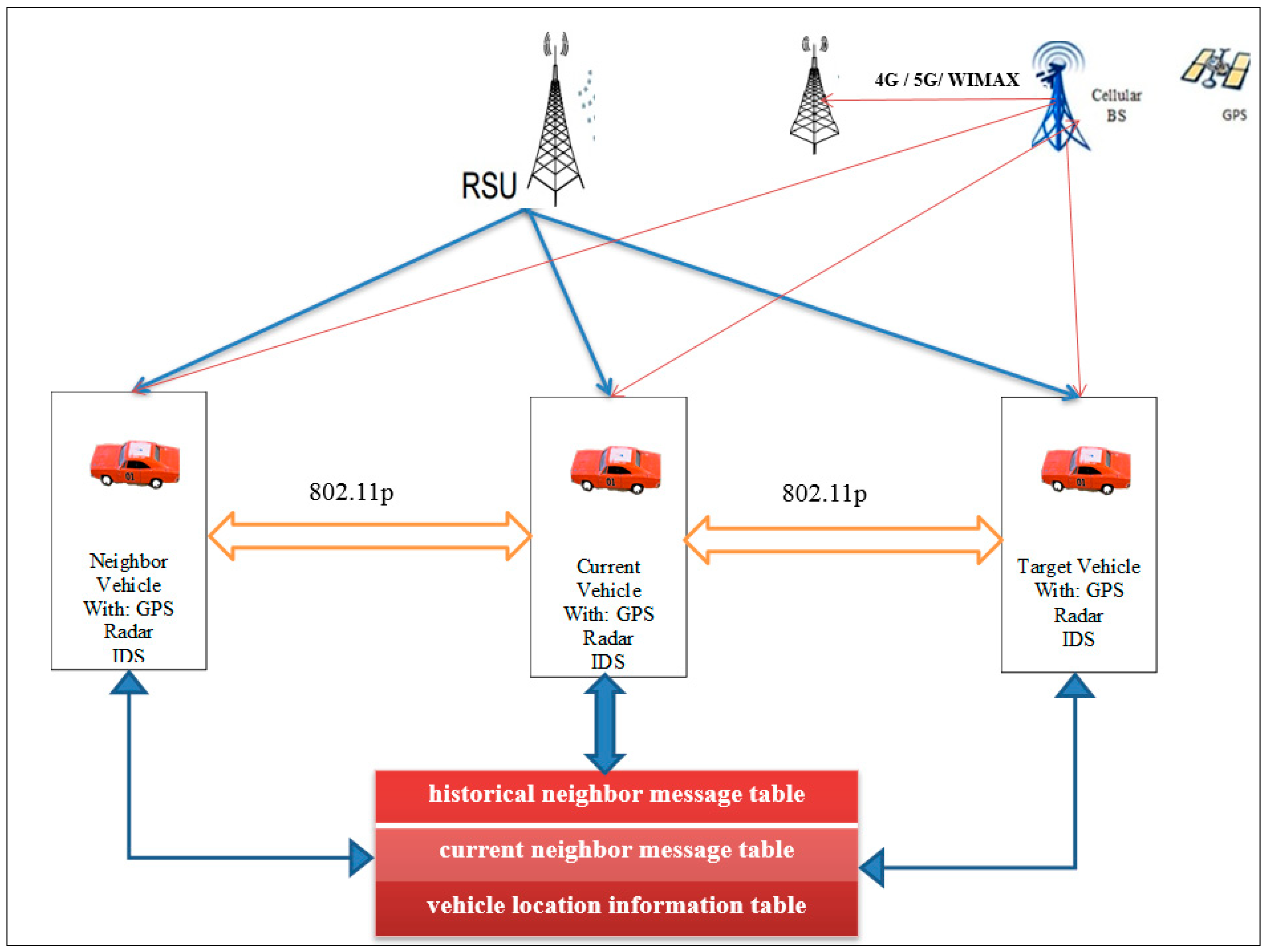
2. Vehicle Ad Hoc Network (VANET) Model
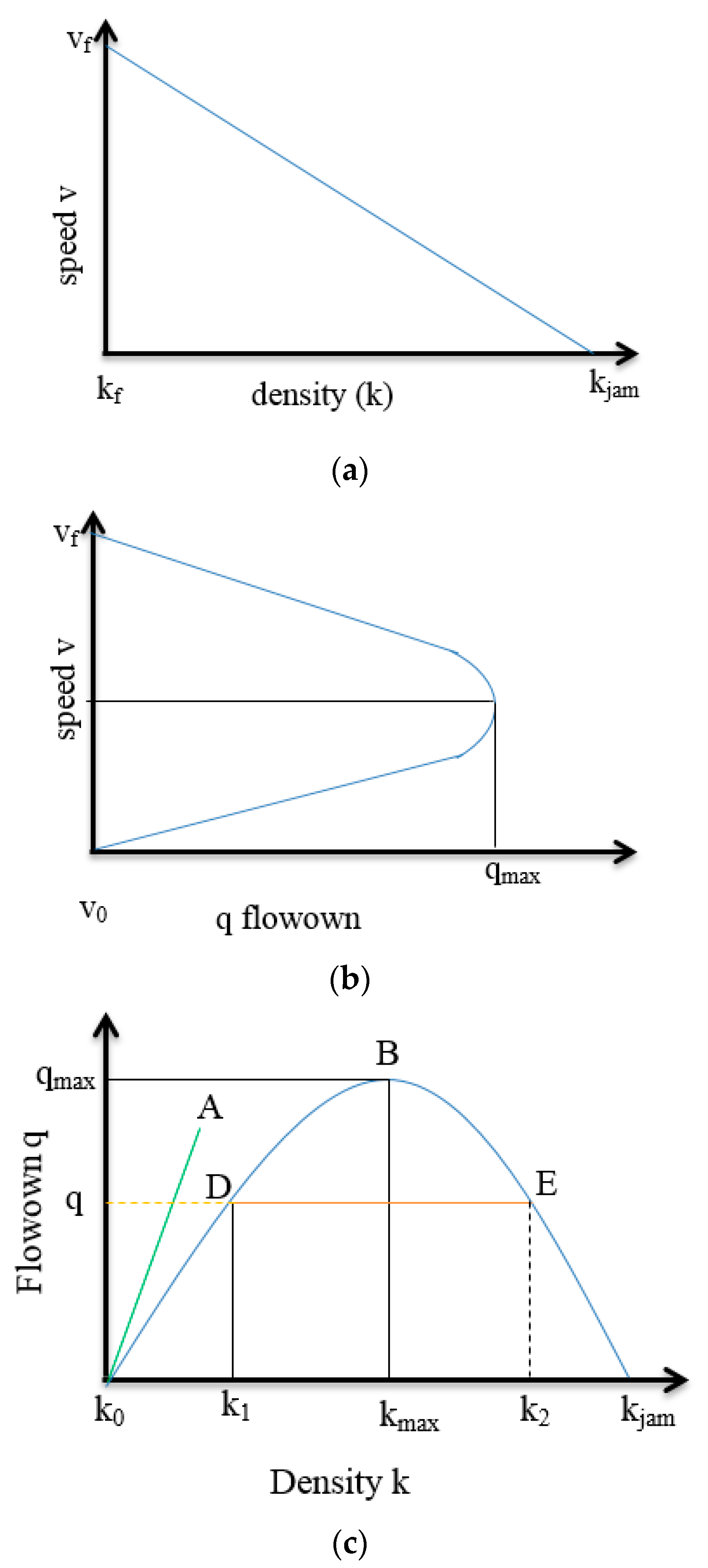
2.1. VANET Model. Measurements
2.2. VANET Message Format
2.3. VANET Information
3. Intrusion Detection System Based on HGNG Neural Network
- In wired networks, the VANET of IDS cannot be used due to the wireless and mobile features and their dynamic topology features.
- Because VANET is a highly dynamic network and the attacked time of vehicles will be very short, the receiving information of vehicles should be quickly verified and responded. In other words, the veracity and reliability of vehicle messages in a VANET should be determined quickly and accurately.
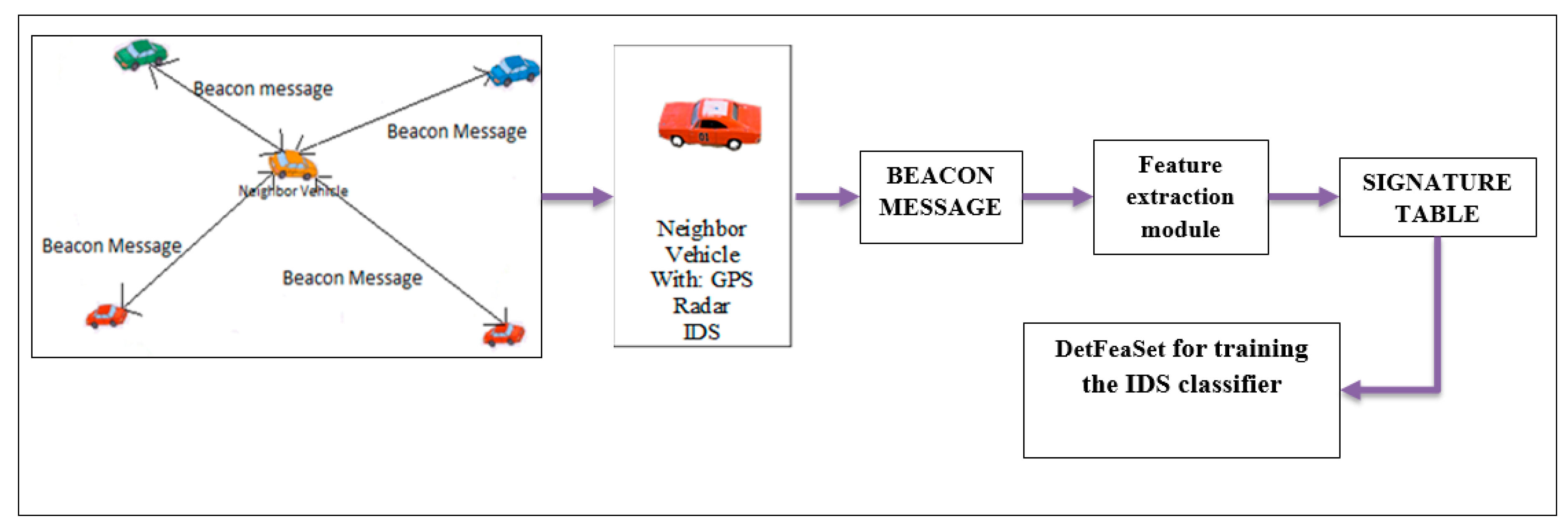
3.1. HGNG-Based IDS
3.2. Preprocessing Feature Extraction
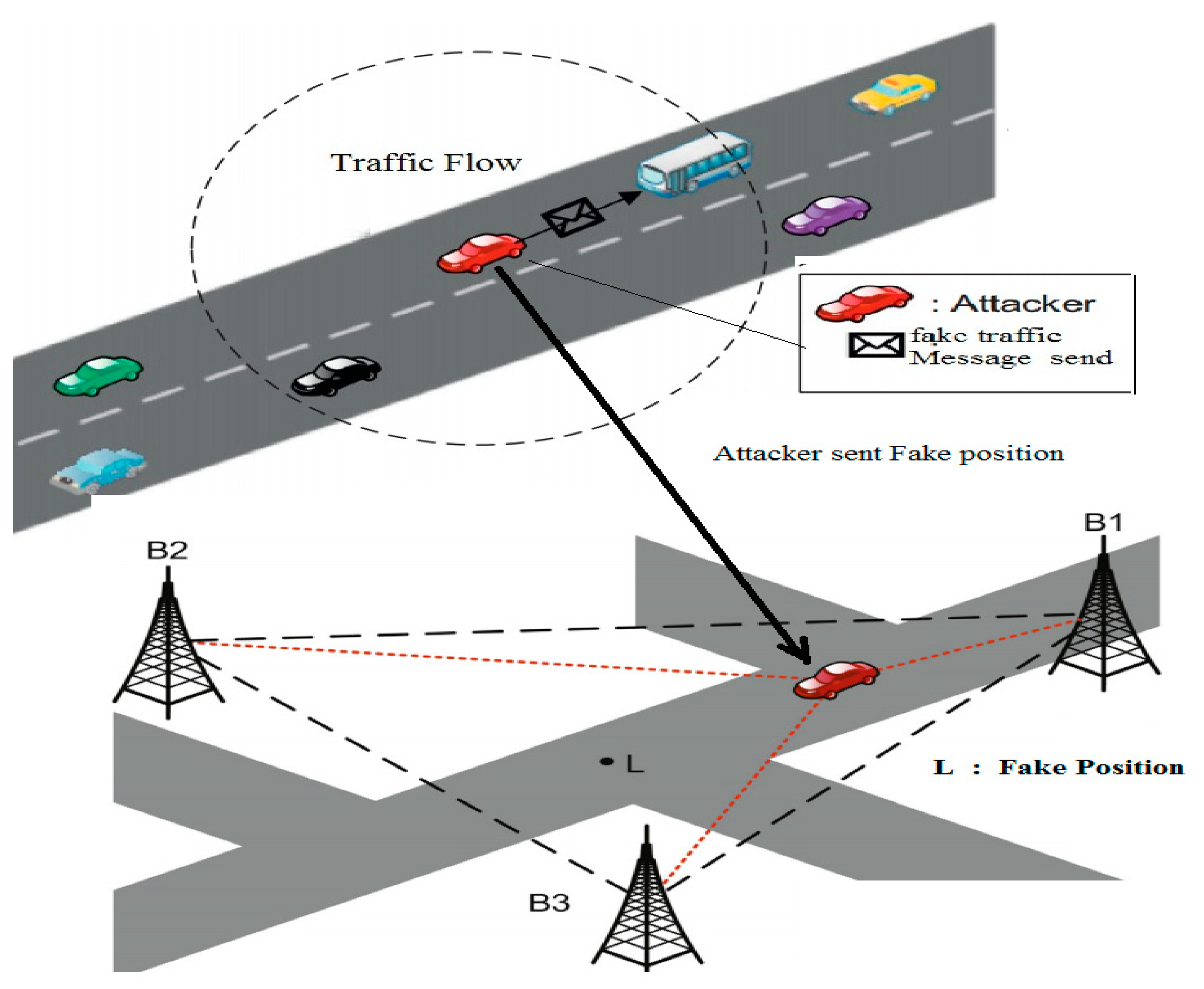
3.3. Based on HGNG Neural Network Outlier Detection
- Initialization A consists of two elements A = {c1, c2, c3}. The coordinates of three randomly selected points in the input sample D(FlowR, PositionR) are used as the reference vectors of c1, c2 and c3. Initialization Unit Connection Set C = {(c1, c2), (c2, c3), (c1, c3)}. Set the current learning step = 0.
- Learning times, step = step + 1, select a point ε randomly from the input eigenvector as the input sample and find the nearest-neighbor and next-nearest neighbor units of ε in A:where represents the norm of the Euclidean space vector.
- If there is no connection between n1 and n2, add the connection between the two cells:Set age (n1, n2) = 0 for connection (n1, n2). And increase the age of all connections for cell n1:
- Update the error of n1 by the square of the Euclidean distance between σ and the reference vector of the nearest neighbor cell n1:
- Update the reference vectors of n1 and its topological neighbors with the following rules:where γb and γn represent the learning rate of winning unit n1 and its topology neighborhood, respectively.
- If the learning frequency is an integral multiple of the unit insertion frequency φ, insert the new unit as follows:Find the unit p with the largest accumulation error and the maximum error unit in the topology neighborhood of p qAdd a new node element K whose reference vector and error are the mean of p and q:Delete the connection (p, q), add new connections (p, k) and (q, k) and reduce the accumulation error of units p, q, k by a percentage:
- Reduce the cumulative error of all units by a fixed percentage .
- Delete all all connections whose age is greater than the parameter αmax, and delete if the number of connections to a cell is 0 at the time of deletion:
- If the set termination condition is reached, for example, the number of learning step > stepmax, then terminate; otherwise, skip to step (ii) to continue learning.
4. Performance Evaluations
4.1. Experimental Environment
4.2. Experimental Parameters
4.3. Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Al-Sultan, S.; Al-Doori, M.M.; Al-Bayatti, A.H.; Zedan, H. A comprehensive survey on vehicular Ad Hoc network. J. Netw. Comput. Appl. 2014, 37, 380–392. [Google Scholar] [CrossRef]
- Sarika, S.; Pravin, A.; Vijayakumar, A.; Selvamani, K. Security Issues in Mobile Ad Hoc Networks. Procedia Comput. Sci. 2016, 92, 329–335. [Google Scholar] [CrossRef]
- Lee, K.C. Geographic Routing in Vehicular Ad Hoc Networks. Ph.D. Thesis, University of California at Los Angeles, Los Angeles, CA, USA, 2010. [Google Scholar]
- Jiang, D.; Delgrossi, L. IEEE 802.11p: Towards an international standard for wireless access in vehicular environments. In Proceedings of the VTC Spring 2008—IEEE Vehicular Technology Conference, Singapore, 11–14 May 2008. [Google Scholar]
- Leontiadis, I.; Marfia, G.; Mack, D.; Pau, G.; Mascolo, C.; Gerla, M. On the Effectiveness of an Opportunistic Traffic Management System for Vehicular Networks. IEEE Trans. Intell. Transp. Syst. 2011, 12, 1537–1548. [Google Scholar] [CrossRef] [Green Version]
- Alasmary, W.; Zhuang, W. Mobility impact in IEEE 802.11p infrastructureless vehicular networks. Ad Hoc Netw. 2012, 10, 222–230. [Google Scholar] [CrossRef] [Green Version]
- McGibney, J.; Botvich, D.; Balasubramaniam, S. A combined biologically and socially inspired approach to mitigating ad hoc network threats. In Proceedings of the 2007 IEEE 66th Vehicular Technology Conference, Baltimore, MD, USA, 30 September–3 October 2007. [Google Scholar]
- Raya, M.; Papadimitratos, P.; Gligor, V.D.; Hubaux, J.P. On data-centric trust establishment in ephemeral ad hoc networks. In Proceedings of the 27th Conference on Computer Communications, Phoenix, AZ, USA, 13–18 April 2008. [Google Scholar]
- Wex, P.; Breuer, J.; Held, A.; Leinm, T. Trust Issues for Vehicular Ad Hoc Networks. In Proceedings of the VTC Spring 2008—IEEE Vehicular Technology Conference, Singapore, 11–14 May 2008. [Google Scholar]
- Lu, R.; Lin, X.; Luan, T.H.; Liang, X.; Member, S.; Shen, X.S. Pseudonym Changing at Social Spots: An Effective Strategy for Location Privacy in VANETs. IEEE Trans. Veh. Technol. 2012, 61, 86–96. [Google Scholar] [Green Version]
- Minhas, U.F.; Zhang, J. Towards Expanded Trust Management for Agents in Vehicular Ad-hoc Networks. Int. J. Comput. Intell. Appl. Theory Pract. 2016, 2, 1–13. [Google Scholar]
- Kargl, F.; Papadimitratos, P.; Buttyan, L.; Müter, M.; Schoch, E.; Wiedersheim, B.; Thong, T.V.; Calandriello, G.; Held, A.; Kung, A.; et al. Secure vehicular communication systems: Implementation, performance, and research challenges. IEEE Commun. Mag. 2008, 11, 110–118. [Google Scholar] [CrossRef]
- Ruj, S.; Cavenaghi, M.A.; Huang, Z.; Nayak, A.; Stojmenovic, I. On Data-centric Misbehavior Detection in VANETs. In Proceedings of the 2011 IEEE Vehicular Technology Conference (VTC Fall), San Francisco, CA, USA, 5–8 September 2011; pp. 1–5. [Google Scholar]
- Raya, M.; Papadimitratos, P.; Aad, I.; Jungels, D.; Hubaux, J.P. Eviction of misbehaving and faulty nodes in vehicular networks. IEEE J. Sel. Areas Commun. 2007, 8, 1557–1568. [Google Scholar] [CrossRef]
- Sedjelmaci, H.; Senouci, S.M.; Feham, M. An efficient intrusion detection framework in cluster-based wireless sensor networks. Int. J. Appl. Eng. Res. 2014, 9, 5968–5974. [Google Scholar] [CrossRef]
- Parno, B.; Perrig, A. Challenges in securing vehicular networks. Work. Hot Top. Netw. 2015, 2, 1–6. [Google Scholar]
- Sedjelmaci, H.; Senouci, S.M. An accurate and efficient collaborative intrusion detection framework to secure vehicular networks. Comput. Electr. Eng. 2015, 43, 33–47. [Google Scholar] [CrossRef]
- Yu, B.; Xu, C.Z.; Xiao, B. Detecting Sybil attacks in VANETs. J. Parallel Distrib. Comput. 2013, 73, 746–756. [Google Scholar] [CrossRef]
- Sedjelmaci, H.; Senouci, S.M.; Abu-Rgheff, M.A. An efficient and lightweight intrusion detection mechanism for service-oriented vehicular networks. IEEE Intern. Things J. 2014, 1, 570–577. [Google Scholar] [CrossRef]
- Mokdad, L.; Ben-Othman, J.; Nguyen, A. DJAVAN: Detecting jamming attacks in Vehicle Ad hoc Networks. Perform. Eval. 2015, 87, 47–59. [Google Scholar] [CrossRef]
- Sedjelmaci, H.; Bouali, T.; Senouci, S.M. Detection and prevention from misbehaving intruders in vehicular networks. In Proceedings of the 2014 IEEE Global Communications Conference, Austin, TX, USA, 8–12 December 2014. [Google Scholar]
- Sedjelmaci, H.; Senouci, S.M.; Ansari, N. Intrusion Detection and Ejection Framework Against Lethal Attacks in UAV-Aided Networks: A Bayesian Game-Theoretic Methodology. IEEE TRASECTION Syst. 2017, 18, 1143–1153. [Google Scholar] [CrossRef]
- Yan, S.; Member, S.; Malaney, R.; Nevat, I.; Peters, G.W. Optimal Information-Theoretic Wireless Location Verification. IEEE Transic. 2014, 63, 3410–3422. [Google Scholar] [CrossRef] [Green Version]
- Rakha, H.; Crowther, B. Comparison of Greenshields, Pipes, and Van Aerde vehicle-following and traffic stream models. J. Transp. Res. Board 2002, 1802, 248–262. [Google Scholar] [CrossRef]
- Azlan, N.N.N.; Rohani, M.M. Overview of Application of Traffic Simulation Model. In Proceedings of the Malaysian Technical Universities Conference on Engineering and Technology (MUCET 2017), Penang, Malaysia, 6–7 December 2017; pp. 1–6. [Google Scholar]
- Sommer, C.; Eckhoff, D.; German, R.D. A computationally inexpensive empirical model of IEEE 802.11 p radio shadowing in urban environments. In Proceedings of the 2011 Eighth International Conference on Wireless On-Demand Network Systems and Services, Bardonecchia, Italy, 26–28 Janurary 2011; pp. 84–90. [Google Scholar]
- Fritzke, B. A Growing Neural Gas Network Learns Topologies. In Proceedings of the 7th International Conference on Neural Information Processing Systems, Denver, CO, USA, 28 November–1 December 1994. [Google Scholar]
- Saleem, W.; Schall, O.; Patane, G.; Belyaev, A.S.H. On stochastic methods for surface reconstruction. Vis. Comput. 2007, 6, 381–395. [Google Scholar] [CrossRef]
- Mari, J.F.; Saito, J.H.; Poli, G.L.A. Improving the neural meshes algorithm for 3D surface reconstruction with edge swap operations. In Proceedings of the 2008 ACM Symposium on Applied Computing (SAC), Fortaleza, Brazil, 16–20 March 2008; pp. 1236–1240. [Google Scholar]
- Fritzke, B. A Growing Neural Gas Network Learns Topologies. Adv. Neural Inf. Process. Syst. 1995, 7, 625–632. [Google Scholar]
- Satomi, M.; Masuta, H.; Kubota, N. Hierarchical growing neural gas for information structured space. In Proceedings of the 2009 IEEE Workshop on Robotic Intelligence in Informationally Structured Space, Nashville, TN, USA, 30 March–2 April 2009. [Google Scholar]
- Rauber, A.; Merkl, D.; Dittenbach, M. The growing hierarchical self-organizing map: Exploratory analysis of high-dimensional data. IEEE Trans. Neural Netw. 2002, 13, 1331–1341. [Google Scholar] [CrossRef] [PubMed]
- Issariyakul, T.; Hossain, E. Introduction to Network Simulator NS2, 1st ed.; Springer: Boston, MA, USA, 2012; ISBN 9781461414063. [Google Scholar]
- Behrisch, M.; Bieker, L.; Erdmann, J.; Krajzewicz, D. SUMO-Simulation of Urban MObility: An Overview. In Proceedings of the SIMUL 2011: The Third International Conference on Advances in System Simulation, Barcelona, Spain, 23–28 October 2011. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Current Neighbor Message Table | Store |
| Historical Neighbor Message Table | Store |
| Location Information Table | Store |
| Parameter | Value |
|---|---|
| Experimental scene | 2 lane of 5 km highway |
| Maximum vehicle speed | 100 km/h |
| Wireless communication protocol | 802.11p |
| Transmission range | 500 m |
| Simulation time | 165 s |
| Vehicle arrival interval | 1 s |
| Transmission interval | 0.5 s |
| The corresponding waiting times | 0.2 s |
| Tau1, Tau2 | 0.1, 0.01 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ayoob, A.A.; Su, G.; Al, G. Hierarchical Growing Neural Gas Network (HGNG)-Based Semicooperative Feature Classifier for IDS in Vehicular Ad Hoc Network (VANET). J. Sens. Actuator Netw. 2018, 7, 41. https://doi.org/10.3390/jsan7030041
Ayoob AA, Su G, Al G. Hierarchical Growing Neural Gas Network (HGNG)-Based Semicooperative Feature Classifier for IDS in Vehicular Ad Hoc Network (VANET). Journal of Sensor and Actuator Networks. 2018; 7(3):41. https://doi.org/10.3390/jsan7030041
Chicago/Turabian StyleAyoob, Ayoob Azeez, Gang Su, and Gaith Al. 2018. "Hierarchical Growing Neural Gas Network (HGNG)-Based Semicooperative Feature Classifier for IDS in Vehicular Ad Hoc Network (VANET)" Journal of Sensor and Actuator Networks 7, no. 3: 41. https://doi.org/10.3390/jsan7030041