Performance Evaluation of Maximum Power Point Tracking Approaches and Photovoltaic Systems

 ,
,  ,
,  and
and
Abstract
:1. Introduction
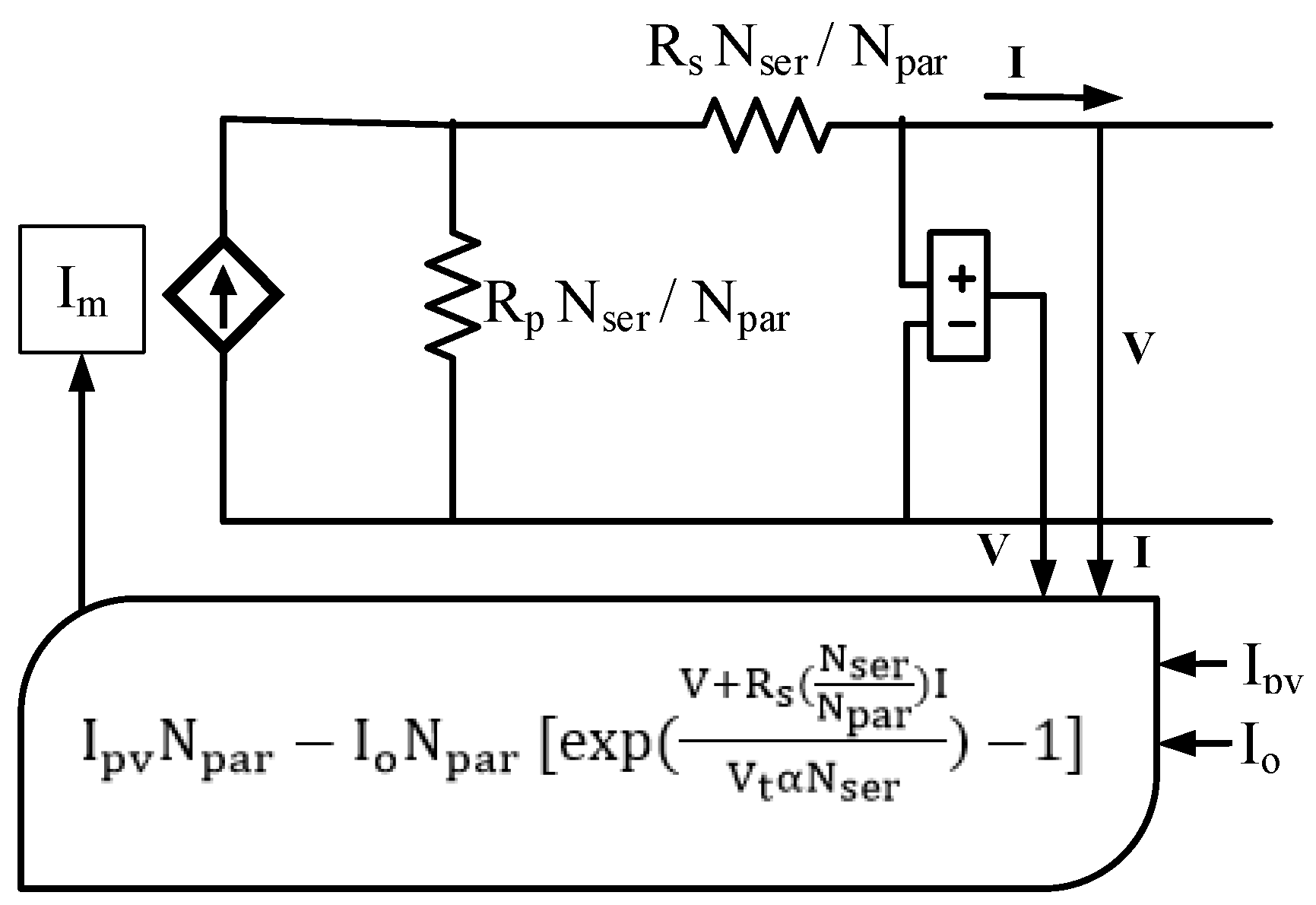
2. PV Array Modeling
- IPV: current generated by the incident light (A)
- Io: reverse saturation or leakage current of a diode (A)
- q: electron charge (1.60217 C)
- k: boltzmann constant (1.38065 J/k)
- α: diode ideality constant (1< α < 1.5).
- Rs: equivalent series resistance of the array (Ω)
- RP: equivalent parallel resistance of the array (Ω)
- Nser: number of cells in series.
- Npar: number of cells in parallel.
- T: temperature of a P-N junction (k), and.
- Vt: the thermal voltage of an array (V)
3. Assessment of Common MPPT Strategies
3.1. INC Algorithms
3.2. P&O MPPTs
3.3. Other MPPT Techniques
4. Performance Evaluation Parameters
4.1. PV Module Technologies
4.2. PV Module Connections
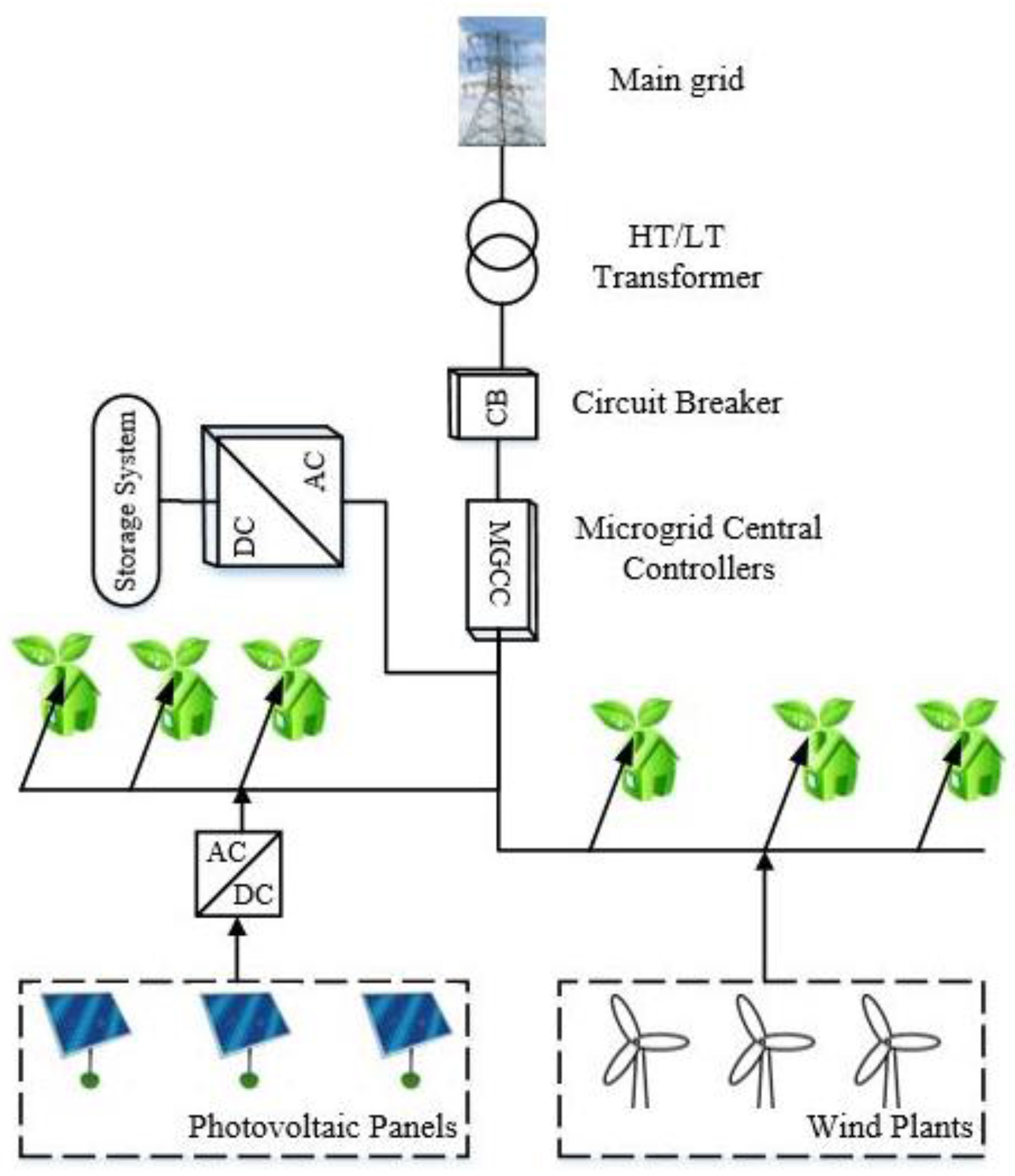
4.3. Grid-Connected PV Stability and Island Mode
4.4. Seasons and Locations of PV Installation
4.5. PV Panel Tilts and Orientations
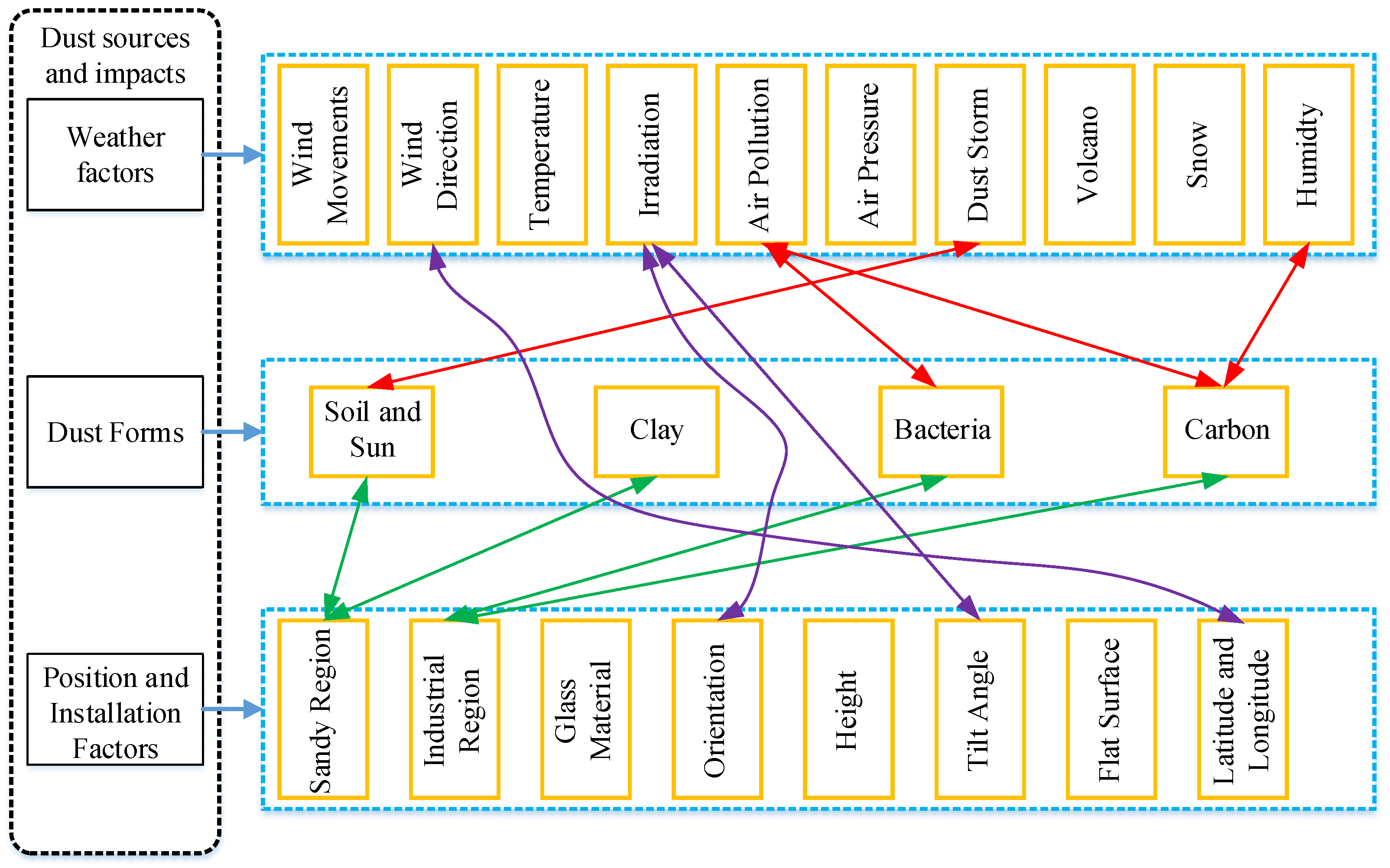
4.6. PV Module Soiling Effects
4.7. PV Panel Snow Effects
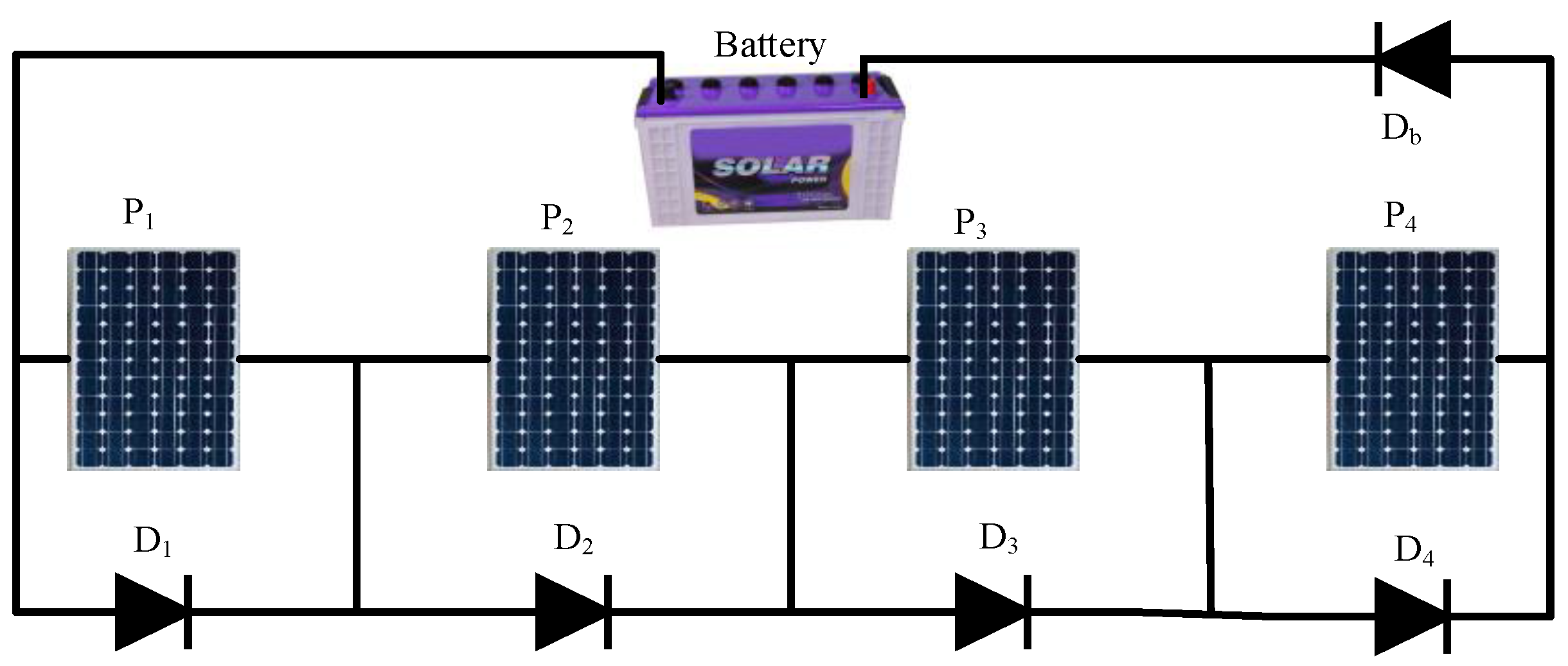
4.8. Bypass and Blocking Diodes
4.9. Implementation Complexity
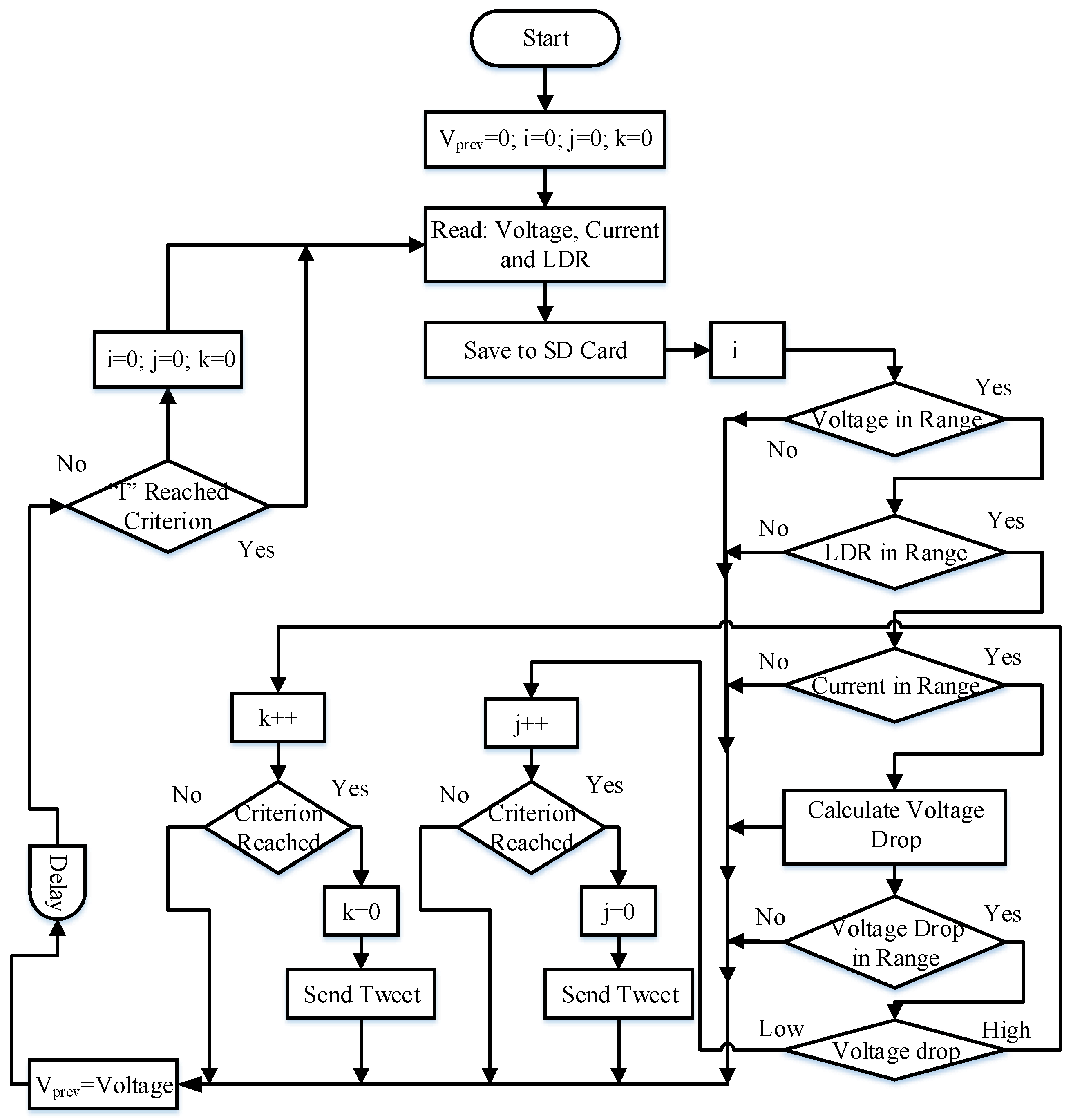
4.10. Effect of Sensors, Switches, and Passive Components
4.11. Cost
4.12. Photovoltaic Array Size
4.13. PV Converter Selection
4.14. PV Controller Selection
4.15. Load Effect
4.16. PSC Handling
4.17. Oscillation Near MPP
4.18. Tracking Performance
4.19. Convergence Speed
4.20. PV Power Efficiency
4.21. Applications of MPPTs
5. Discussion and Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Azman, A.Y.; Rahman, A.A.; Bakar, N.A.; Hanaffi, F.; Khamis, A. Study of renewable energy potential in Malaysia. In Proceedings of the 2011 IEEE First Conference on Clean Energy and Technology (CET), Kuala Lumpur, Malaysia, 27–29 June 2011; pp. 170–176. [Google Scholar]
- Tan, S.T.; Ho, W.S.; Hashim, H.; Lee, C.T. A feasibility study of renewable energy and carbon emission reduction in Iskandar Malaysia. In Proceedings of the 2014 International Conference and Utility Exhibition on Green Energy for Sustainable Development (ICUE), Pattaya, Thailand, 19–21 March 2014; pp. 1–6. [Google Scholar]
- Bose, B.K. Global warming: Energy, environmental pollution, and the impact of power electronics. IEEE Ind. Electron. Mag. 2010, 4, 6–17. [Google Scholar] [CrossRef]
- Bull, S.R. Renewable energy today and tomorrow. Proc. IEEE 2001, 89, 1216–1226. [Google Scholar] [CrossRef]
- Huynh, D.C.; Dunnigan, M.W. Development and Comparison of an Improved Incremental Conductance Algorithm for Tracking the MPP of a Solar PV Panel. IEEE Trans. Sustain. Energy 2016, 7, 1421–1429. [Google Scholar] [CrossRef]
- Radjai, T.; Rahmani, L.; Mekhilef, S.; Gaubert, J.P. Implementation of a modified incremental conductance MPPT algorithm with direct control based on a fuzzy duty cycle change estimator using dSPACE. Sol. Energy 2014, 110, 325–337. [Google Scholar] [CrossRef]
- Blazev, A.S. Photovoltaics for Commercial and Utilities Power Generation; Lulu Press, Inc.: Morrisville, NC, USA, 2013. [Google Scholar]
- Karami, N.; Moubayed, N.; Outbib, R. General review and classification of different MPPT Techniques. Renew. Sustain. Energy Rev. 2017, 68, 1–18. [Google Scholar] [CrossRef]
- Seyedmahmoudian, M.; Horan, B.; Soon, T.K.; Rahmani, R.; Oo, A.M.T.; Mekhilef, S.; Stojcevski, A. State of the art artificial intelligence-based MPPT techniques for mitigating partial shading effects on PV systems—A review. Renew. Sustain. Energy Rev. 2016, 64, 435–455. [Google Scholar] [CrossRef]
- Faranda, R.; Leva, S. Energy comparison of MPPT techniques for PV Systems. WSEAS Trans. Power Syst. 2008, 3, 446–455. [Google Scholar]
- Liu, Y.-H.; Huang, S.-C.; Huang, J.-W.; Liang, W.-C. A particle swarm optimization-based maximum power point tracking algorithm for PV systems operating under partially shaded conditions. IEEE Trans. Energy Convers. 2012, 27, 1027–1035. [Google Scholar] [CrossRef]
- Wang, Y.; Li, Y.; Ruan, X. High-Accuracy and Fast-Speed MPPT Methods for PV String Under Partially Shaded Conditions. IEEE Trans. Ind. Electron. 2016, 63, 235–245. [Google Scholar] [CrossRef]
- Ji, Y.-H.; Jung, D.-Y.; Kim, J.-G.; Kim, J.-H.; Lee, T.-W.; Won, C.-Y. A real maximum power point tracking method for mismatching compensation in PV array under partially shaded conditions. IEEE Trans. Power Electron. 2011, 26, 1001–1009. [Google Scholar] [CrossRef]
- Carannante, G.; Fraddanno, C.; Pagano, M.; Piegari, L. Experimental performance of MPPT algorithm for photovoltaic sources subject to inhomogeneous insolation. IEEE Trans. Ind. Electron. 2009, 56, 4374–4380. [Google Scholar] [CrossRef]
- Lyden, S.; Haque, M.; Gargoom, A.; Negnevitsky, M. Review of maximum power point tracking approaches suitable for PV systems under partial shading conditions. In Proceedings of the 2013 Australasian Universities Power Engineering Conference (AUPEC), Hobart, Australia, 9 September–3 Octorber 2013; pp. 1–6. [Google Scholar]
- Mohamed, M.A.-E.-H. Efficient approximation of photovoltaic model using dependent thevenin equivalent circuit based on exponential sums function. In Proceedings of the 2015 IEEE 42nd Photovoltaic Specialist Conference (PVSC), New Orleans, LA, USA, 14–19 June 2015; pp. 1–6. [Google Scholar]
- Hejri, M.; Mokhtari, H. On the Comprehensive Parametrization of the Photovoltaic (PV) Cells and Modules. IEEE J. Photovolt. 2017, 7, 250–258. [Google Scholar] [CrossRef]
- Villalva, M.G.; Gazoli, J.R.; Ruppert Filho, E. Modeling and circuit-based simulation of photovoltaic arrays. In Proceedings of the 2009 Brazilian Power Electronics Conference, Bonito-Mato Grosso do Sul, Brazil, 27 September–1 Octorber 2009; pp. 1244–1254. [Google Scholar]
- Hussein, K.H.; Muta, I.; Hoshino, T.; Osakada, M. Maximum photovoltaic power tracking: An algorithm for rapidly changing atmospheric conditions. IEE Proc. Gener. Transm. Distrib. 1995, 142, 59–64. [Google Scholar] [CrossRef]
- Elgendy, M.A.; Zahawi, B.; Atkinson, D.J. Evaluation of incremental conductance MPPT algorithm at low perturbation rates. In Proceedings of the 7th IET International Conference on Power Electronics, Machines and Drives (PEMD 2014), Manchester, UK, 8–10 April 2014; pp. 1–6. [Google Scholar]
- Lee, J.-G.; Ko, J.-S.; Jeong, D.-E.; Jeong, H.-G.; Kim, D.-K.; Chung, D.-H. High performance MPPT control of photovoltaic using VSSIC method. In Proceedings of the 2012 IEEE Vehicle Power and Propulsion Conference (VPPC), Seoul, Korea, 9–12 Octorber 2012; pp. 1371–1374. [Google Scholar]
- Hossain, M.J.; Tiwari, B.; Bhattacharya, I. An adaptive step size incremental conductance method for faster maximum power point tracking. In Proceedings of the 2016 IEEE 43rd Photovoltaic Specialists Conference (PVSC), Portland, OR, USA, 5–10 June 2016; pp. 3230–3233. [Google Scholar]
- Jedari, M.; Gharehpetian, G.; Fathi, S.H.; Vahids, S. An adaptive InCon MPPT algorithm considering irradiance slope tracking for PV application. In Proceedings of the 2016 4th International Symposium on Environment Friendly Energies and Applications (EFEA), Belgrade, Serbia, 14–16 September 2016; pp. 1–6. [Google Scholar]
- Liu, F.; Duan, S.; Liu, F.; Liu, B.; Kang, Y. A variable step size INC MPPT method for PV systems. IEEE Trans. Ind. Electron. 2008, 55, 2622–2628. [Google Scholar]
- Mei, Q.; Shan, M.; Liu, L.; Guerrero, J.M. A novel improved variable step-size incremental-resistance MPPT method for PV systems. IEEE Trans. Ind. Electron. 2011, 58, 2427–2434. [Google Scholar] [CrossRef]
- Hsieh, G.-C.; Hsieh, H.-I.; Tsai, C.-Y.; Wang, C.-H. Photovoltaic power-increment-aided incremental-conductance MPPT with two-phased tracking. IEEE Trans. Power Electron. 2013, 28, 2895–2911. [Google Scholar] [CrossRef]
- Hsieh, G.-C.; Tsai, C.-Y.; Hsieh, H.-I. Photovoltaic power-increment-aided incremental-conductance maximum power point tracking using variable frequency and duty controls. In Proceedings of the 2012 3rd IEEE International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Aalborg, Denmark, 25–28 June 2012; pp. 542–549. [Google Scholar]
- Soon, T.K.; Mekhilef, S. A fast-converging MPPT technique for photovoltaic system under fast-varying solar irradiation and load resistance. IEEE Trans. Ind. Inform. 2015, 11, 176–186. [Google Scholar] [CrossRef]
- Patel, H.; Agarwal, V. Maximum power point tracking scheme for PV systems operating under partially shaded conditions. IEEE Trans. Ind. Electron. 2008, 55, 1689–1698. [Google Scholar] [CrossRef]
- Xiao, W.; Dunford, W.G.; Palmer, P.R.; Capel, A. Application of centered differentiation and steepest descent to maximum power point tracking. IEEE Trans. Ind. Electron. 2007, 54, 2539–2549. [Google Scholar] [CrossRef]
- Radianto, D.; Dousouky, G.M.; Shoyama, M. MPPT based on incremental conductance-fuzzy logic algorithm for photovoltaic system under variable climate conditions. In Proceedings of the 2015 IEEE International Telecommunications Energy Conference (INTELEC), Osaka, Japan, 18–22 Octorber 2015; pp. 1–5. [Google Scholar]
- Deshpande, A.; Patil, S.; Deopare, H. Comparative simulation of conventional maximum power point tracking methods. In Proceedings of the 2016 International Conference on Computing, Communication and Automation (ICCCA), Noida, India, 29–30 April 2016; pp. 1025–1028. [Google Scholar]
- Saravanan, S.; Babu, N.R. Performance analysis of boost & Cuk converter in MPPT based PV system. In Proceedings of the 2015 International Conference on Circuit, Power and Computing Technologies (ICCPCT), Nagercoil, India, 19–20 March 2015; pp. 1–6. [Google Scholar]
- Bendib, B.; Belmili, H.; Krim, F. A survey of the most used MPPT methods: Conventional and advanced algorithms applied for photovoltaic systems. Renew. Sustain. Energy Rev. 2015, 45, 637–648. [Google Scholar] [CrossRef]
- Saidi, A.; Benachaiba, C. Comparison of IC and P&O algorithms in MPPT for grid connected PV module. In Proceedings of the 2016 8th International Conference on Modelling, Identification and Control (ICMIC), Algiers, Algeria, 15–17 November 2016; pp. 213–218. [Google Scholar]
- Ashique, R.H.; Salam, Z.; Ahmed, J. An adaptive P&O MPPT using a sectionalized piece-wise linear PV curve. In Proceedings of the 2015 IEEE Conference on Energy Conversion (CENCON), Johor Bahru, Malaysia, 19–20 Octorber 2015; pp. 474–479. [Google Scholar]
- Abdelsalam, A.K.; Massoud, A.M.; Ahmed, S.; Enjeti, P.N. High-performance adaptive perturb and observe MPPT technique for photovoltaic-based microgrids. IEEE Trans. Power Electron. 2011, 26, 1010–1021. [Google Scholar] [CrossRef]
- Jiang, Y.; Qahouq, J.A.A.; Haskew, T.A. Adaptive step size with adaptive-perturbation-frequency digital MPPT controller for a single-sensor photovoltaic solar system. IEEE Trans. Power Electron. 2013, 28, 3195–3205. [Google Scholar] [CrossRef]
- Kollimalla, S.K.; Mishra, M.K. Variable perturbation size adaptive P&O MPPT algorithm for sudden changes in irradiance. IEEE Trans. Sustain. Energy 2014, 5, 718–728. [Google Scholar]
- Kollimalla, S.K.; Mishra, M.K. A novel adaptive P&O MPPT algorithm considering sudden changes in the irradiance. IEEE Trans. Energy Convers. 2014, 29, 602–610. [Google Scholar]
- Killi, M.; Samanta, S. Modified perturb and observe MPPT algorithm for drift avoidance in photovoltaic systems. IEEE Trans. Ind. Electron. 2015, 62, 5549–5559. [Google Scholar] [CrossRef]
- Ahmad, S.; Rashid, M.T.; Ferdowsy, C.S.; Islam, S.; Mahmood, A.H. A technical comparison among different PV-MPPT algorithms to observe the effect of fast changing solar irradiation. In Proceedings of the 2015 IEEE International WIE Conference on Electrical and Computer Engineering (WIECON-ECE), Dhaka, Bangladesh, 19–20 December 2015; pp. 155–158. [Google Scholar]
- Sher, H.A.; Murtaza, A.F.; Noman, A.; Addoweesh, K.E.; Al-Haddad, K.; Chiaberge, M. A New sensorless hybrid MPPT algorithm based on fractional short-circuit current measurement and P&O MPPT. IEEE Trans. Sustain. Energy 2015, 6, 1426–1434. [Google Scholar]
- Shebani, M.M.; Iqbal, T.; Quaicoe, J.E. Comparing bisection numerical algorithm with fractional short circuit current and open circuit voltage methods for MPPT photovoltaic systems. In Proceedings of the 2016 IEEE Electrical Power and Energy Conference (EPEC), Ottawa, ON, Canada, 12–14 Octorber 2016; pp. 1–5. [Google Scholar]
- Manickam, C.; Raman, G.R.; Raman, G.P.; Ganesan, S.I.; Nagamani, C. A Hybrid Algorithm for Tracking of GMPP Based on P&O and PSO With Reduced Power Oscillation in String Inverters. IEEE Trans. Ind. Electron. 2016, 63, 6097–6106. [Google Scholar]
- Sebtahmadi, S.S.; Azad, H.B.; Kaboli, S.H.A.; Islam, M.D.; Mekhilef, S. A PSO-DQ current control scheme for performance enhancement of Z-source matrix converter to drive IM Fed by abnormal voltage. IEEE Trans. Power Electron. 2018, 33, 1666–1681. [Google Scholar] [CrossRef]
- Teo, K.T.K.; Lim, P.Y.; Chua, B.L.; Goh, H.H.; Tan, M.K. Maximum Power Point Tracking of Partially Shaded Photovoltaic Arrays Using Particle Swarm Optimization. In Proceedings of the 2014 4th International Conference on Artificial Intelligence with Applications in Engineering and Technology (ICAIET), Kota Kinabalu, Malaysia, 3–5 December 2014; pp. 247–252. [Google Scholar]
- Radjai, T.; Gaubert, J.P.; Rahmani, L.; Mekhilef, S. Experimental verification of P&O MPPT algorithm with direct control based on Fuzzy logic control using CUK converter. Int. Trans. Electr. Energy Syst. 2015, 25, 3492–3508. [Google Scholar]
- Sundareswaran, K.; Vigneshkumar, V.; Sankar, P.; Simon, S.P.; Nayak, P.S.R.; Palani, S. Development of an improved P&O algorithm assisted through a colony of foraging ants for MPPT in PV system. IEEE Trans. Ind. Inform. 2016, 12, 187–200. [Google Scholar]
- Jiang, L.L.; Nayanasiri, D.; Maskell, D.L.; Vilathgamuwa, D. A hybrid maximum power point tracking for partially shaded photovoltaic systems in the tropics. Renew. Energy 2015, 76, 53–65. [Google Scholar] [CrossRef]
- Mahmoud, Y.; Abdelwahed, M.; El-Saadany, E.F. An Enhanced MPPT Method Combining Model-Based and Heuristic Techniques. IEEE Trans. Sustain. Energy 2016, 7, 576–585. [Google Scholar] [CrossRef]
- Mohanty, S.; Subudhi, B.; Ray, P.K. A Grey Wolf Assisted Perturb &Observe MPPT Algorithm for a Photovoltaic Power System. IEEE Trans. Energy Convers. 2016, 32, 340–347. [Google Scholar]
- Tousi, S.R.; Moradi, M.H.; Basir, N.S.; Nemati, M. A function-based maximum power point tracking method for photovoltaic systems. IEEE Trans. Power Electron. 2016, 31, 2120–2128. [Google Scholar] [CrossRef]
- Pradhan, R.; Subudhi, B. Double integral sliding mode MPPT control of a photovoltaic system. IEEE Trans. Control Syst. Technol. 2016, 24, 285–292. [Google Scholar] [CrossRef]
- Montoya, D.G.; Ramos-Paja, C.A.; Giral, R. Improved design of sliding-mode controllers based on the requirements of MPPT techniques. IEEE Trans. Power Electron. 2016, 31, 235–247. [Google Scholar] [CrossRef]
- Ram, J.P.; Rajasekar, N. A novel Flower Pollination based Global Maximum Power Point method for Solar Maximum Power Point Tracking. IEEE Trans. Power Electron. 2016, 32, 8486–8499. [Google Scholar]
- Krstic, M.; Ghaffari, A.; Seshagiri, S. Extremum seeking for wind and solar energy applications. In Proceedings of the 2014 11th World Congress on Intelligent Control and Automation (WCICA), Shenyang, China, 29 June–4 July 2014; pp. 6184–6193. [Google Scholar]
- Li, X.; Wen, H.; Jiang, L.; Lim, E.G.; Du, Y.; Zhao, C. Photovoltaic Modified β-Parameter-based MPPT Method with Fast Tracking. J. Power Electron. 2016, 16, 9–17. [Google Scholar] [CrossRef]
- Li, X.; Wen, H.; Jiang, L.; Hu, Y.; Zhao, C. An Improved Beta Method with Autoscaling Factor for Photovoltaic System. IEEE Trans. Ind. Appl. 2016, 52, 4281–4291. [Google Scholar] [CrossRef]
- Duan, S.; Yan, G.; Jin, L.; Ren, J.; Wu, W. Design of photovoltaic power generation mppt controller based on SIC MOSFET. In Proceedings of the TENCON 2015-2015 IEEE Region 10 Conference, Macao, China, 1–4 November 2015; pp. 1–5. [Google Scholar]
- Eldin, S.S.; Abd-Elhady, M.; Kandil, H. Feasibility of solar tracking systems for PV panels in hot and cold regions. Renew. Energy 2016, 85, 228–233. [Google Scholar] [CrossRef]
- Esram, T.; Chapman, P.L. Comparison of photovoltaic array maximum power point tracking techniques. IEEE Trans. Energy Convers. 2007, 22, 439–449. [Google Scholar] [CrossRef]
- Elbaset, A.A.; Ali, H.; El Sattar, M.A. New seven parameters model for amorphous silicon and thin film PV modules based on solar irradiance. Sol. Energy 2016, 138, 26–35. [Google Scholar] [CrossRef]
- Kahoul, N.; Chenni, R.; Cheghib, H.; Mekhilef, S. Evaluating the reliability of crystalline silicon photovoltaic modules in harsh environment. Renew. Energy 2017, 109, 66–72. [Google Scholar] [CrossRef]
- Bianchini, A.; Gambuti, M.; Pellegrini, M.; Saccani, C. Performance analysis and economic assessment of different photovoltaic technologies based on experimental measurements. Renew. Energy 2016, 85, 1–11. [Google Scholar] [CrossRef]
- Visa, I.; Burduhos, B.; Neagoe, M.; Moldovan, M.; Duta, A. Comparative analysis of the infield response of five types of photovoltaic modules. Renew. Energy 2016, 95, 178–190. [Google Scholar] [CrossRef]
- Wang, Y.-J.; Hsu, P.-C. An investigation on partial shading of PV modules with different connection configurations of PV cells. Energy 2011, 36, 3069–3078. [Google Scholar] [CrossRef]
- Villalva, M.G.; Gazoli, J.R.; Ruppert Filho, E. Comprehensive approach to modeling and simulation of photovoltaic arrays. IEEE Trans. Power Electron. 2009, 24, 1198–1208. [Google Scholar] [CrossRef]
- Gao, L.; Dougal, R.A.; Liu, S.; Iotova, A.P. Parallel-connected solar PV system to address partial and rapidly fluctuating shadow conditions. IEEE Trans. Ind. Electron. 2009, 56, 1548–1556. [Google Scholar]
- Bonfiglio, A.; Delfino, F.; Invernizzi, M.; Labella, A.; Mestriner, D.; Procopio, R.; Serra, P. Approximate characterization of large Photovoltaic power plants at the Point of Interconnection. In Proceedings of the 2015 50th International Universities Power Engineering Conference (UPEC), Stoke on Trent, UK, 1–4 September 2015; pp. 1–5. [Google Scholar]
- Hasan, R.; Mekhilef, S.; Seyedmahmoudian, M.; Horan, B. Grid-connected isolated PV microinverters: A review. Renew. Sustain. Energy Rev. 2017, 67, 1065–1080. [Google Scholar] [CrossRef]
- Obi, M.; Bass, R. Trends and challenges of grid-connected photovoltaic systems—A review. Renew. Sustain. Energy Rev. 2016, 58, 1082–1094. [Google Scholar] [CrossRef]
- Liu, S.; Liu, P.X.; Wang, X. Stochastic small-signal stability analysis of grid-connected photovoltaic systems. IEEE Trans. Ind. Electron. 2016, 63, 1027–1038. [Google Scholar] [CrossRef]
- Yao, X.; Tan, B.; Hu, C. Islanding detection for PV plant using instantaneous power theory. In Proceedings of the 2016 IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 3–5 Octorber 2016; pp. 1495–1498. [Google Scholar]
- Palizban, O.; Kauhaniemi, K. Microgrid control principles in island mode operation. In Proceedings of the 2013 IEEE Grenoble PowerTech (POWERTECH), Grenoble, France, 16–20 June 2013; pp. 1–6. [Google Scholar]
- Liu, Z.; Dong, X.; Wu, Z.; Chen, L.; Yu, C.; Zhang, B.; Liu, W. Typical island micro-grid operation analysis. In Proceedings of the 2016 China International Conference on Electricity Distribution (CICED), Xi’an, China, 10–13 August 2016; pp. 1–4. [Google Scholar]
- Wang, Z.; Chen, B.; Wang, J. Decentralized energy management system for networked microgrids in grid-connected and islanded modes. IEEE Trans. Smart Grid 2016, 7, 1097–1105. [Google Scholar] [CrossRef]
- Cubi, E.; Zibin, N.F.; Thompson, S.J.; Bergerson, J. Sustainability of rooftop technologies in cold climates: Comparative life cycle assessment of white roofs, green roofs, and photovoltaic panels. J. Ind. Ecol. 2016, 20, 249–262. [Google Scholar] [CrossRef]
- Despotovic, M.; Nedic, V. Comparison of optimum tilt angles of solar collectors determined at yearly, seasonal and monthly levels. Energy Convers. Manag. 2015, 97, 121–131. [Google Scholar] [CrossRef]
- Hartner, M.; Ortner, A.; Hiesl, A.; Haas, R. East to west–The optimal tilt angle and orientation of photovoltaic panels from an electricity system perspective. Appl. Energy 2015, 160, 94–107. [Google Scholar] [CrossRef]
- Khatib, T.; Mohamed, A.; Mahmoud, M.; Sopian, K. Optimization of the tilt angle of solar panels for Malaysia. Energy Sources. Part A Recovery Util. Environ. Eff. 2015, 37, 606–613. [Google Scholar] [CrossRef]
- Darwish, Z.A.; Kazem, H.A.; Sopian, K.; Al-Goul, M.; Alawadhi, H. Effect of dust pollutant type on photovoltaic performance. Renew. Sustain. Energy Rev. 2015, 41, 735–744. [Google Scholar] [CrossRef]
- Maghami, M.R.; Hizam, H.; Gomes, C.; Radzi, M.A.; Rezadad, M.I.; Hajighorbani, S. Power loss due to soiling on solar panel: A review. Renew. Sustain. Energy Rev. 2016, 59, 1307–1316. [Google Scholar] [CrossRef]
- Saidan, M.; Albaali, A.G.; Alasis, E.; Kaldellis, J.K. Experimental study on the effect of dust deposition on solar photovoltaic panels in desert environment. Renew. Energy 2016, 92, 499–505. [Google Scholar] [CrossRef]
- Schill, C.; Brachmann, S.; Koehl, M. Impact of soiling on IV-curves and efficiency of PV-modules. Sol. Energy 2015, 112, 259–262. [Google Scholar] [CrossRef]
- Heidari, N.; Gwamuri, J.; Townsend, T.; Pearce, J.M. Impact of Snow and ground interference on photovoltaic electric system performance. IEEE J. Photovolt. 2015, 5, 1680–1685. [Google Scholar] [CrossRef]
- Meghdadi, S.; Iqbal, T. A low cost method of snow detection on solar panels and sending alerts. J. Clean Energy Technol. 2015, 3, 393–397. [Google Scholar] [CrossRef]
- Myong, S.Y.; Park, Y.-C.; Jeon, S.W. Performance of Si-based PV rooftop systems operated under distinct four seasons. Renew. Energy 2015, 81, 482–489. [Google Scholar] [CrossRef]
- Hasan, M.; Parida, S. An overview of solar photovoltaic panel modeling based on analytical and experimental viewpoint. Renew. Sustain. Energy Rev. 2016, 60, 75–83. [Google Scholar] [CrossRef]
- Chellaswamy, C.; Ramesh, R. Parameter extraction of solar cell models based on adaptive differential evolution algorithm. Renew. Energy 2016, 97, 823–837. [Google Scholar] [CrossRef]
- Kim, K.A.; Seo, G.-S.; Cho, B.-H.; Krein, P.T. Photovoltaic hot-spot detection for solar panel substrings using ac parameter characterization. IEEE Trans. Power Electron. 2016, 31, 1121–1130. [Google Scholar] [CrossRef]
- Lee, J.E.; Bae, S.; Oh, W.; Park, H.; Kim, S.M.; Lee, D.; Nam, J.; Mo, C.B.; Kim, D.; Yang, J. Investigation of damage caused by partial shading of CuInxGa (1-x) Se2 photovoltaic modules with bypass diodes. Prog. Photovolt. Res. Appl. 2016, 24, 1035–1043. [Google Scholar] [CrossRef]
- Daliento, S.; Di Napoli, F.; Guerriero, P.; d’Alessandro, V. A modified bypass circuit for improved hot spot reliability of solar panels subject to partial shading. Sol. Energy 2016, 134, 211–218. [Google Scholar] [CrossRef]
- Kumar, K.K.; Bhaskar, R.; Koti, H. Implementation of MPPT algorithm for solar photovoltaic cell by comparing short-circuit method and incremental conductance method. Procedia Technol. 2014, 12, 705–715. [Google Scholar] [CrossRef]
- Safari, A.; Mekhilef, S. Simulation and hardware implementation of incremental conductance MPPT with direct control method using cuk converter. IEEE Trans. Ind. Electron. 2011, 58, 1154–1161. [Google Scholar] [CrossRef]
- Loukriz, A.; Haddadi, M.; Messalti, S. Simulation and experimental design of a new advanced variable step size Incremental Conductance MPPT algorithm for PV systems. ISA Trans. 2016, 62, 30–38. [Google Scholar] [CrossRef] [PubMed]
- Scarpa, V.V.; Buso, S.; Spiazzi, G. Low-complexity MPPT technique exploiting the PV module MPP locus characterization. IEEE Trans. Ind. Electron. 2009, 56, 1531–1538. [Google Scholar] [CrossRef]
- Kotti, R.; Shireen, W. Efficient MPPT control for PV systems adaptive to fast changing irradiation and partial shading conditions. Sol. Energy 2015, 114, 397–407. [Google Scholar] [CrossRef]
- Dousoky, G.M.; Shoyama, M. New parameter for current-sensorless MPPT in grid-connected photovoltaic VSIs. Sol. Energy 2017, 143, 113–119. [Google Scholar] [CrossRef]
- Verma, D.; Nema, S.; Shandilya, A.; Dash, S.K. Maximum power point tracking (MPPT) techniques: Recapitulation in solar photovoltaic systems. Renew. Sustain. Energy Rev. 2016, 54, 1018–1034. [Google Scholar] [CrossRef]
- Ezinwanne, O.; Zhongwen, F.; Zhijun, L. Energy Performance and Cost Comparison of MPPT Techniques for Photovoltaics and other Applications. Energy Procedia 2017, 107, 297–303. [Google Scholar] [CrossRef]
- Roy, A.; Kabir, M.A. Relative life cycle economic analysis of stand-alone solar PV and fossil fuel powered systems in Bangladesh with regard to load demand and market controlling factors. Renew. Sustain. Energy Rev. 2012, 16, 4629–4637. [Google Scholar] [CrossRef]
- Espinoza-Trejo, D.R.; Bárcenas-Bárcenas, E.; Campos-Delgado, D.U.; De Angelo, C.H. Voltage-oriented input–output linearization controller as maximum power point tracking technique for photovoltaic systems. IEEE Trans. Ind. Electron. 2015, 62, 3499–3507. [Google Scholar]
- El Khateb, A.H.; Rahim, N.A.; Selvaraj, J.; Williams, B.W. DC-to-DC converter with low input current ripple for maximum photovoltaic power extraction. IEEE Trans. Ind. Electron. 2015, 62, 2246–2256. [Google Scholar] [CrossRef] [Green Version]
- Tey, K.S.; Mekhilef, S.; Seyedmahmoudian, M.; Horan, B.; Oo, A.M.T.; Stojcevski, A. Improved Differential Evolution-based MPPT Algorithm using SEPIC for PV Systems under Partial Shading Conditions and Load Variation. IEEE Trans. Ind. Inform. 2018. [Google Scholar] [CrossRef]
- Harrag, A.; Messalti, S. Variable step size modified P&O MPPT algorithm using GA-based hybrid offline/online PID controller. Renew. Sustain. Energy Rev. 2015, 49, 1247–1260. [Google Scholar]
- Farhat, M.; Barambones, O.; Sbita, L. Efficiency optimization of a DSP-based standalone PV system using a stable single input fuzzy logic controller. Renew. Sustain. Energy Rev. 2015, 49, 907–920. [Google Scholar] [CrossRef]
- Sivakumar, P.; Kader, A.A.; Kaliavaradhan, Y.; Arutchelvi, M. Analysis and enhancement of PV efficiency with incremental conductance MPPT technique under non-linear loading conditions. Renew. Energy 2015, 81, 543–550. [Google Scholar] [CrossRef]
- Tey, K.S.; Mekhilef, S. Modified incremental conductance MPPT algorithm to mitigate inaccurate responses under fast-changing solar irradiation level. Sol. Energy 2014, 101, 333–342. [Google Scholar] [CrossRef]
- Uno, M.; Kukita, A. Two-Switch Voltage Equalizer Using an LLC Resonant Inverter and Voltage Multiplier for Partially Shaded Series-Connected Photovoltaic Modules. IEEE Trans. Ind. Appl. 2015, 51, 1587–1601. [Google Scholar] [CrossRef]
- Babu, T.S.; Rajasekar, N.; Sangeetha, K. Modified particle swarm optimization technique based maximum power point tracking for uniform and under partial shading condition. Appl. Soft Comput. 2015, 34, 613–624. [Google Scholar] [CrossRef]
- Messalti, S.; Harrag, A.; Loukriz, A. A new variable step size neural networks MPPT controller: Review, simulation and hardware implementation. Renew. Sustain. Energy Rev. 2017, 68, 221–233. [Google Scholar] [CrossRef]
- Latham, A.M.; Sullivan, C.R.; Odame, K.M. Performance of photovoltaic maximum power point tracking algorithms in the presence of noise. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition (ECCE), Atlanta, GA, USA, 12–16 September 2010; pp. 632–639. [Google Scholar]
- Walker, S.; Sooriyaarachchi, N.; Liyanage, N.; Abeynayake, P.; Abeyratne, S. Comparative analysis of speed of convergence of MPPT techniques. In Proceedings of the 2011 6th IEEE International Conference on Industrial and Information Systems (ICIIS), Kandy, Sri Lanka, 16–19 August 2011; pp. 522–526. [Google Scholar]
- Li, X.; Wen, H.; Jiang, L.; Xiao, W.; Du, Y.; Zhao, C. An Improved MPPT Method for PV System with Fast-Converging Speed and Zero Oscillation. IEEE Trans. Ind. Appl. 2016, 52, 5051–5064. [Google Scholar] [CrossRef]
- Husain, M.A.; Tariq, A.; Hameed, S.; Arif, M.S.B.; Jain, A. Comparative assessment of maximum power point tracking procedures for photovoltaic systems. Green Energy Environ. 2017, 2, 5–17. [Google Scholar] [CrossRef]
- Ling, L.; Wu, X.; Liu, M.; Zhu, Z.; Li, Y.; Shang, B. Development of photovoltaic hybrid LED street lighting system. In Proceedings of the 2016 IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 3–5 Octorber 2016; pp. 729–732. [Google Scholar]
- Bora, S.A.; Pol, P.V. Development of solar street lamp with energy management algorithm for ensuring lighting throughout a complete night in all climatic conditions. In Proceedings of the International Conference on Inventive Computation Technologies (ICICT), Coimbatore, India, 26–27 August 2016; Volume 2, pp. 1–5. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters/INC MPPTs | Adaptive INC | INR-Based INC [25] | ST-Based INC [5] | FC-Based INC [28] | PI-Based INC [26] | FLC-Based INC [6] |
|---|---|---|---|---|---|---|
| Input variables | , | , | , | , | , | , |
| Control variables | D | , D | D | , D | ||
| Implementation cost | Low | Low | Low | Low | Low | Low |
| Controller types | PIC | Micro controller | Microprocessor | PIC | DSP | dSPACE |
| Converter types | Boost | Boost | Buck-Boost | SEPIC | Fly Back | CUK |
| Complexity | Simple | Simple | Complex | Simple | Complex | Average |
| System independence | High | High | High | High | High | High |
| Reliability in PSCs | Less | High | High | High | High | High |
| Convergence speed | Average | Fast | Fast | Fast | Medium | Fast |
| Oscillation around MPP | No | Less | No | No | No | Less |
| Periodic tuning | Yes | No | Yes | Yes | Yes | Yes |
| Power efficiency | Average | High | High | High | High | High |
| Tracking speed | Slow | Faster | Fast | Fast | Fast | Faster |
| Parameters/P&O MPPTs | Adaptive P&O [40] | FSCC P&O [43] | DA P&O [41] | PSO P&O [45] | FLC P&O [48] | ACO P&O [49] | ANN P&O [50] | MB P&O [51] | GWO P&O [52] |
|---|---|---|---|---|---|---|---|---|---|
| Input variables | , | , | , | , | , | , | , | , | , |
| Control variables | , D | D, ΔI | Vref | D, Load | D | Vref, D | Vref | D | |
| Implementation cost | Low | Low | Low | Low | Low | Low | Low | Low | Low |
| Controller types | dSPACE | dSPACE | Micro-controller | Micro-controller | dSPACE | PIC | DSP | PIC | dSPACE |
| Converter types | Boost | Buck-Boost | SEPIC | Boost | Cuk | Boost | Buck | Boost | Boost |
| Complexity | Simple | Average | Average | Simple | Simple | Simple | Simple | Simple | Simple |
| System Independence | Poor | High | High | High | Average | High | High | High | High |
| Reliability in PSCs | Average | High | High | High | High | High | High | High | high |
| Convergence speed | Fast | Fast | Fast | Faster | Fast | Very Fast | Fast | Fast | Fast |
| Oscillation around MPP | Less | Less | Less | Less | Less | No | less | Less | Less |
| Periodic tuning | Yes | Yes | No | Yes | No | No | Yes | No | No |
| Power efficiency | Medium | High | High | High | High | High | High | High | High |
| Tracking speed | Faster | Fast | Fast | Fast | Fast | Faster | Fast | Faster | Faster |
| Parameters/Other MPPTs | SSJ GMPPT [12] | GAF [53] | DISMC [54] | FPA [56] | ESC [57] | Beta Method [59] |
|---|---|---|---|---|---|---|
| Inputs | , | E, ΔE | , | , | , | , |
| Control variables | Vref | D | D, Vref | D | D | N, β |
| Implementation cost | Less | High | Less | Less | Less | Less |
| Controller | Microcontroller | DSP | FPGA | Arduino | Arduino | dSPACE |
| Converter | Boost | Boost | Boost | Boost | Buck | - |
| Algorithm complexity | Simple | Simple | Simple | Simple | Simple | Moderate |
| System independency | High | High | High | High | High | High |
| Tracking to PSCs | Yes | Yes | Yes | Fast | Faster | Faster |
| Convergence speed | High | High | High | High | High | High |
| Oscillation around MPP | No | Less | Less | No | Less | No |
| Periodic tuning | No | No | No | No | No | Yes |
| Power efficiency | High | High | High | High | High | High |
| Tracking speed | Very fast | Faster | Faster | Fast | Faster | High |
| Parameters/Evaluations | Certain Type | Climate Zone | Reliability | Efficiency | Complexity | Installation Cost | Ocillations | Tracking Speed | System Accuracy |
|---|---|---|---|---|---|---|---|---|---|
| PV Technologies [63,65,66] | Thin-Film | Hot | High | High | Simple | Cheaper | - | - | Best |
| Mono-Crystalline | All | High | Low | Simple | High | - | - | Average | |
| Poli-Crystalline | All | High | High | Simple | High | - | - | Better | |
| Hybrid | Hot | High | High | High | Low | - | - | Best | |
| PV Array Size [100] | Bulky Size | - | Less | Low | High | High | High | - | Average |
| Medium | - | High | Average | Medium | Low | Medium | - | High | |
| Small | - | High | High | Less | Low | Less | - | High | |
| PV Module Connections [67,69] | Series-Parallel | - | High | High | Simple | Cheaper | Less | - | High |
| Series | - | Less | Low | High | Cheap | High | - | Less | |
| Panel tilt and Orientation [80] | Bulky PV | Moderate | High | High | Simple | Cheap | No | High | High |
| PV Installation Conditions [82,83,86] | Soil | Hot | Less | Low | High | - | High | Low | Less |
| Snow | Cold | Less | Low | High | - | High | Low | Average | |
| Dust | Hot | Less | Low | High | - | High | Low | Less | |
| Bypass Diode [90,91] | In shaded Cell | - | Less | Low | High | High | High | Low | Average |
| PV Installation Complexities [8,12] | Sensors | - | High | High | Simple | High | - | - | High |
| Switches | - | High | High | Simple | Average | - | - | High | |
| Passive Component | - | Average | High | Simple | Average | - | - | High | |
| PV Converter Selection [95,103,104] | CUK | - | High | High | Less | High | Less | - | Best |
| Buck Boost | - | Less | Low | High | Low | Less | - | Less | |
| SEPIC | - | Less | Low | High | Low | Lesser | - | Average | |
| PV controller Selection [107] | Arduino | - | Less | Average | Simple | Low | - | - | Less |
| dSPACE | - | High | Medium | Average | High | - | - | Average | |
| DSP | - | High | Medium | Medium | Medium | - | - | Medium | |
| FPGA | - | High | High | High | High | - | - | High | |
| Load Impact [28,108] | Non-Linear | - | Less | Low | High | High | High | low | Less |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Islam, H.; Mekhilef, S.; Shah, N.B.M.; Soon, T.K.; Seyedmahmousian, M.; Horan, B.; Stojcevski, A. Performance Evaluation of Maximum Power Point Tracking Approaches and Photovoltaic Systems. Energies 2018, 11, 365. https://doi.org/10.3390/en11020365
Islam H, Mekhilef S, Shah NBM, Soon TK, Seyedmahmousian M, Horan B, Stojcevski A. Performance Evaluation of Maximum Power Point Tracking Approaches and Photovoltaic Systems. Energies. 2018; 11(2):365. https://doi.org/10.3390/en11020365
Chicago/Turabian StyleIslam, Haidar, Saad Mekhilef, Noraisyah Binti Mohamed Shah, Tey Kok Soon, Mehdi Seyedmahmousian, Ben Horan, and Alex Stojcevski. 2018. "Performance Evaluation of Maximum Power Point Tracking Approaches and Photovoltaic Systems" Energies 11, no. 2: 365. https://doi.org/10.3390/en11020365