Audiohaptic Feedback Enhances Motor Performance in a Low-Fidelity Simulated Drilling Task


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Participants
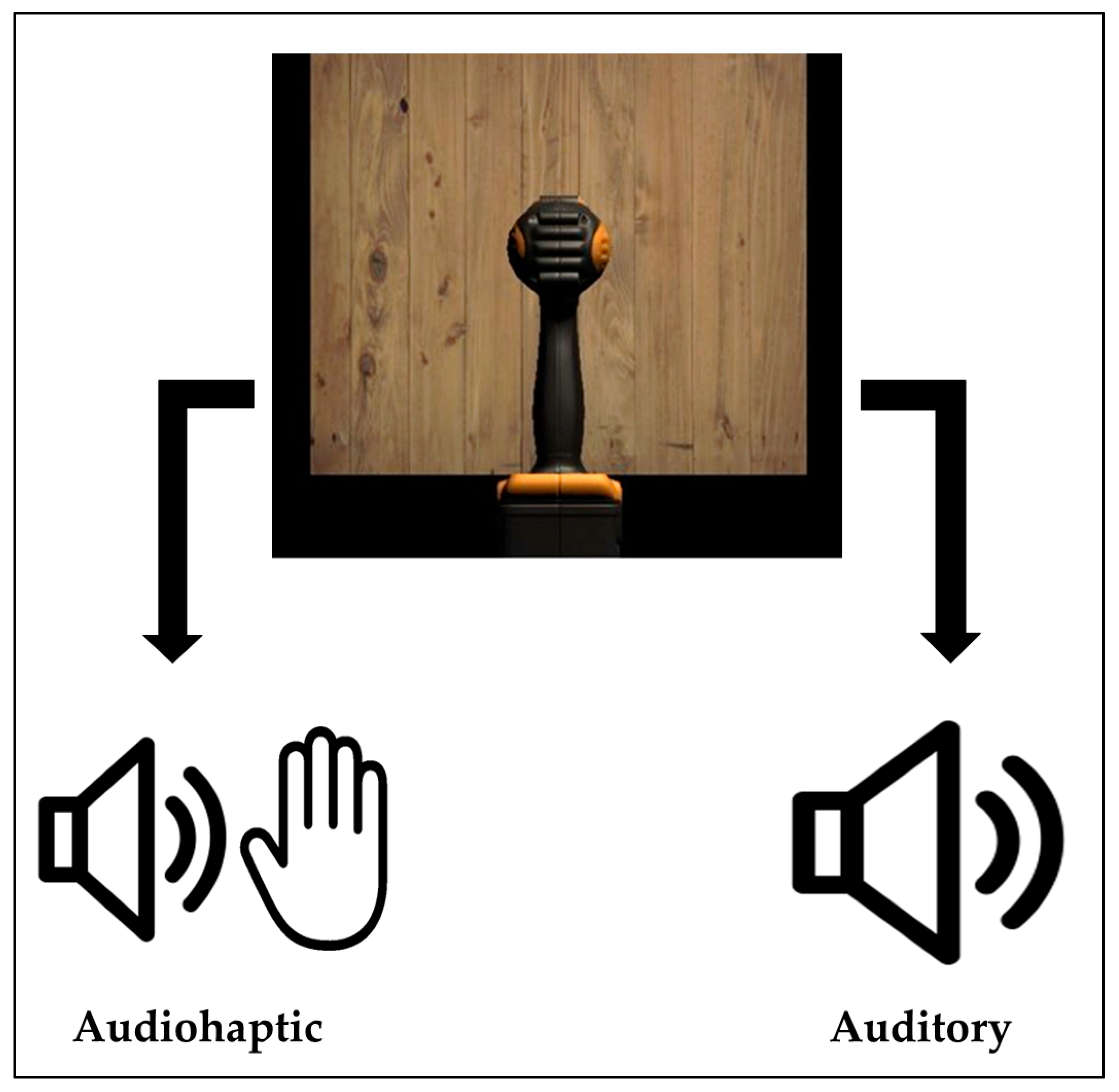
2.2. Auditory Stimuli
2.3. Audiohaptic Stimuli
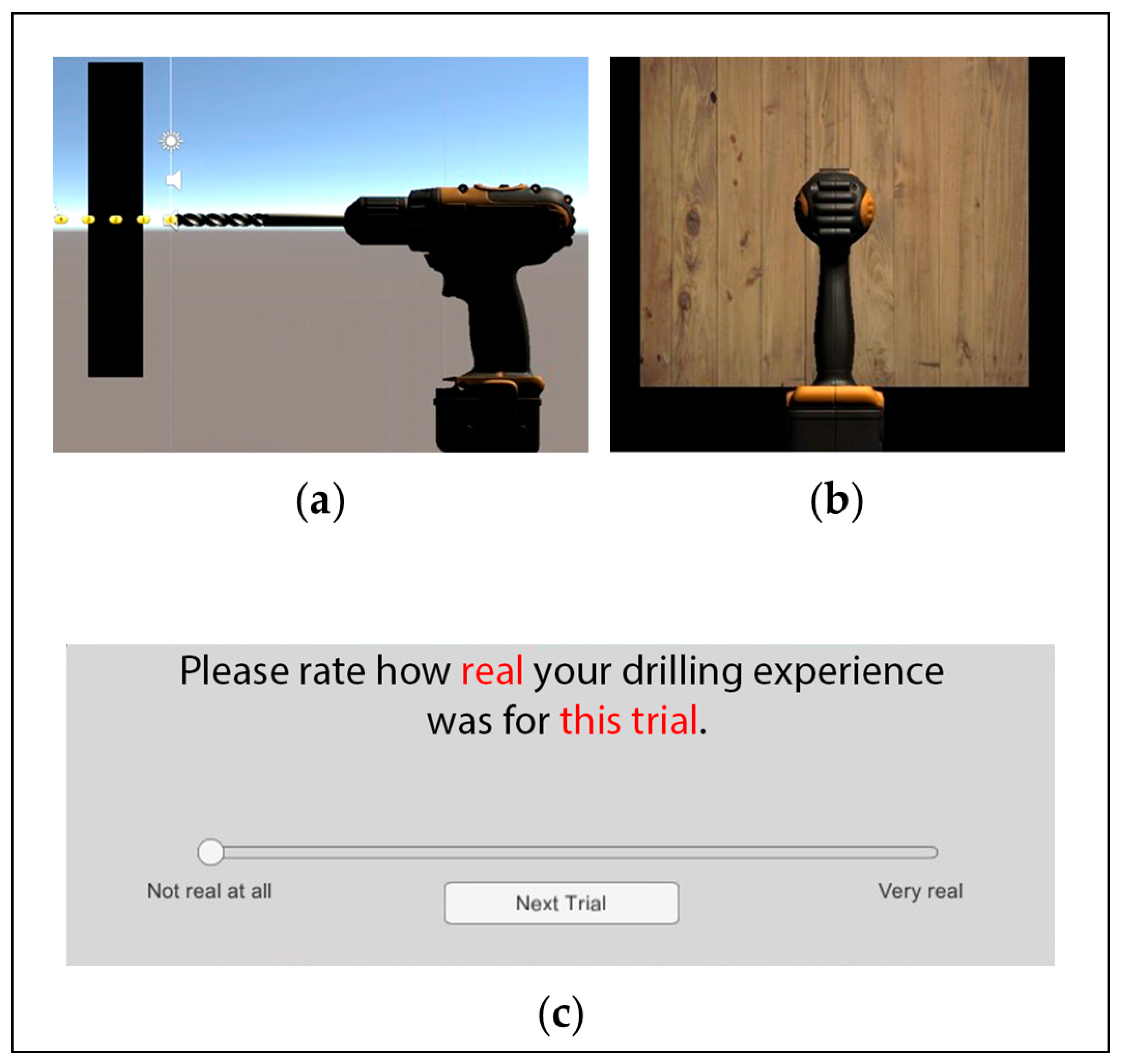
2.4. Procedures
2.5. Data Acquisition and Analysis
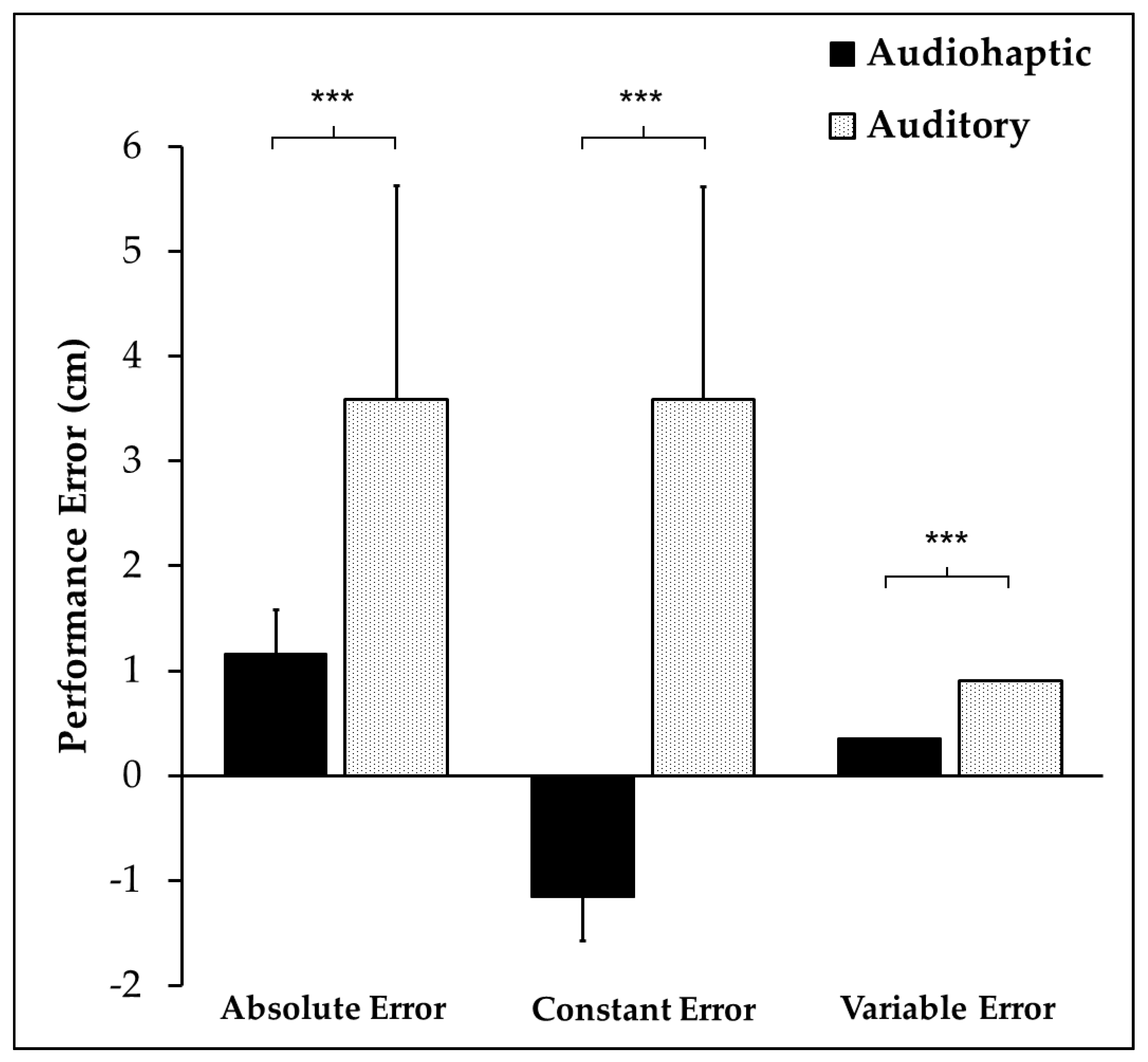
2.5.1. Performance Data
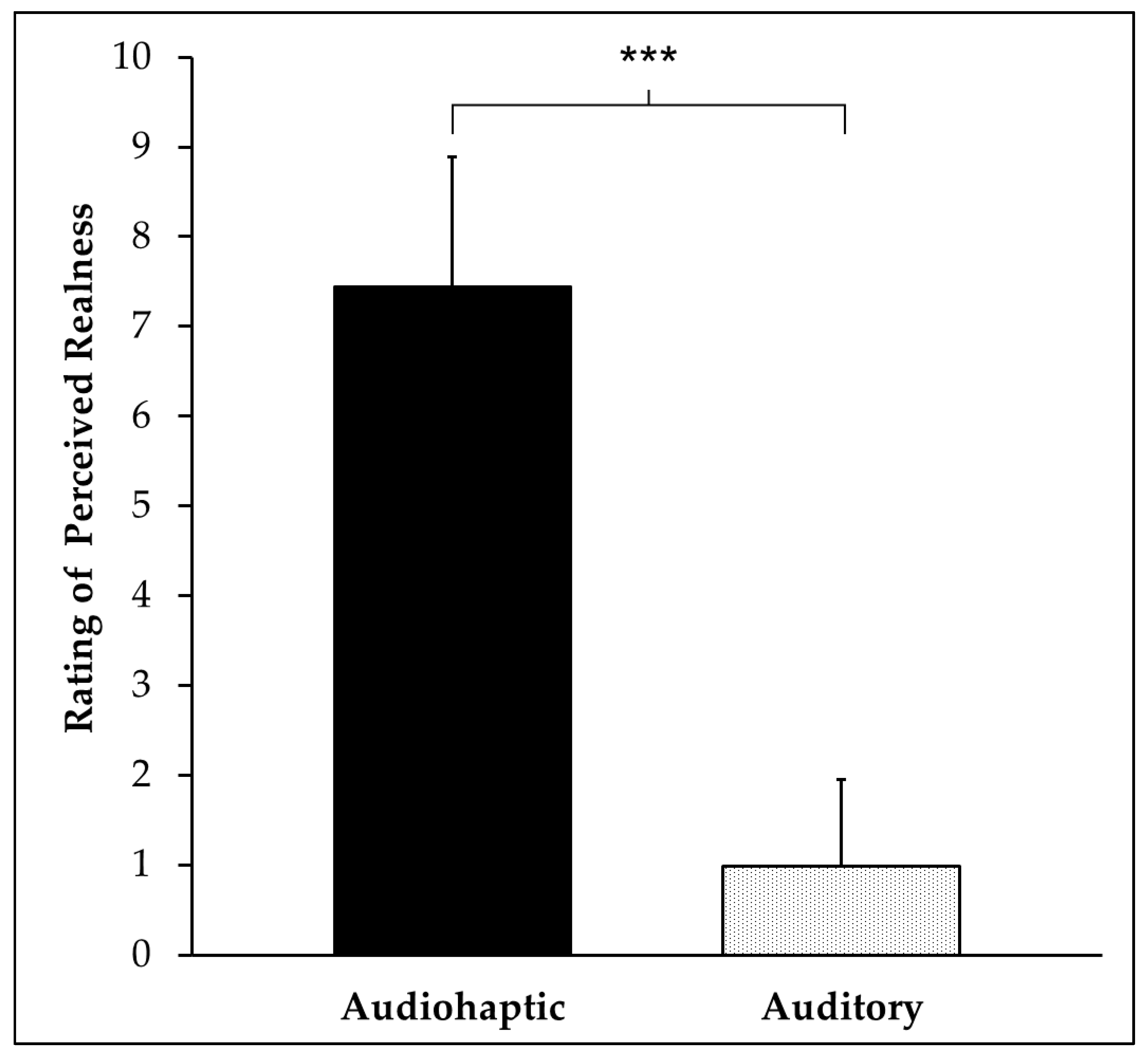
2.5.2. Perceived Realness Data
2.6. Statistical Analysis
3. Results
3.1. Performance Results
3.2. Perceived Realness Results
4. Discussion
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Siu, K.-C.; Best, B.J.; Kim, J.W.; Oleynikov, D.; Ritter, F.E. Adaptive virtual reality training to optimize military medical skills acquisition and retention. Milit. Med. 2016, 181, 214–220. [Google Scholar] [CrossRef] [Green Version]
- Williams-Bell, F.M.; Kapralos, B.; Hogue, A.; Murphy, B.; Weckman, E. Using serious games and virtual simulation for training in the fire service: A review. Fire Technol. 2015, 51, 553–584. [Google Scholar] [CrossRef]
- Coles, T.; Meglan, D.; John, N.W. The role of haptics in medical training simulators: A survey of the state of the art. IEEE Trans. Haptics 2011, 4, 51–66. [Google Scholar] [CrossRef]
- Maxwell, J.; Masters, R.; Kerr, E.; Weedon, E. The implicit benefit of learning without errors. Q. J. Exp. Psychol. Sec. A 2001, 54, 1049–1068. [Google Scholar] [CrossRef]
- Cox, D.J.; Davis, M.; Singh, H.; Barbour, B.; Nidiffer, F.D.; Trudel, T.; Mourant, R.; Moncrief, R. Driving rehabilitation for military personnel recovering from traumatic brain injury using virtual reality driving simulation: A feasibility study. Milit. Med. 2010, 175, 411–416. [Google Scholar] [CrossRef] [Green Version]
- Brydges, R.; Carnahan, H.; Backstein, D.; Dubrowski, A. Application of motor learning principles to complex surgical tasks: Searching for the optimal practice schedule. J. Motor Behav. 2007, 39, 40–48. [Google Scholar] [CrossRef]
- Flavián, C.; Ibáñez-Sánchez, S.; Orús, C. The impact of virtual, augmented and mixed reality technologies on the customer experience. J. Bus. Res. 2019, 100, 547–560. [Google Scholar] [CrossRef]
- Seitz, A.R.; Kim, R.; van Wassenhove, V.; Shams, L. Simultaneous and independent acquisition of multisensory and unisensory associations. Perception 2007, 36, 1445–1453. [Google Scholar] [CrossRef] [Green Version]
- Srinivasan, M.A. What Is Haptics? Laboratory for Human and Machine Haptics, The Touch Lab., Massachusetts Institute of Technology: Cambridge, MA, USA, 2016; pp. 1–11. [Google Scholar]
- Culbertson, H.; Schorr, S.B.; Okamura, A.M. Haptics: The present and future of artificial touch sensation. Annu. Rev. Control Robot. Auton. Syst. 2018, 1, 385–409. [Google Scholar] [CrossRef]
- Melaisi, M.; Rojas, D.; Kapralos, B.; Uribe-Quevedo, A.; Collins, K. Multimodal Interaction of Contextual and Non-Contextual Sound and Haptics in Virtual Simulations. Informatics 2018, 5, 43. [Google Scholar] [CrossRef] [Green Version]
- Coles, T.; John, N.W.; Gould, D.A.; Caldwell, D.G. Haptic palpation for the femoral pulse in virtual interventional radiology. In Proceedings of the 2009 Second International Conferences on Advances in Computer-Human Interactions, Cancun, Mexico, 1–7 February 2009; pp. 193–198. [Google Scholar]
- Brydges, R.; Carnahan, H.; Rose, D.; Rose, L.; Dubrowski, A. Coordinating progressive levels of simulation fidelity to maximize educational benefit. Acad. Med. 2010, 85, 806–812. [Google Scholar] [CrossRef] [PubMed]
- Basdogan, C.; De, S.; Kim, J.; Muniyandi, M.; Kim, H.; Srinivasan, M.A. Haptics in minimally invasive surgical simulation and training. IEEE Comput. Graph. Appl. 2004, 24, 56–64. [Google Scholar] [CrossRef] [PubMed]
- McCracken, H.S.; Murphy, B.A.; Glazebrook, C.M.; Burkitt, J.J.; Karellas, A.M.; Yielder, P.C. Audiovisual multisensory integration and evoked potentials in young adults with and without Attention-Deficit/Hyperactivity Disorder. Front. Hum. Neurosci. 2019, 13, 95. [Google Scholar] [CrossRef] [PubMed]
- Maravita, A.; Spence, C.; Driver, J. Multisensory integration and the body schema: Close to hand and within reach. Curr. Biol. 2003, 13, R531–R539. [Google Scholar] [CrossRef] [Green Version]
- Roll, J.P.; Roll, R.; Velay, J.-L. Proprioception as a link between body space. In Brain and Space; Oxford University Press: Oxford, UK, 1991; pp. 112–132. [Google Scholar]
- Gallagher, S. Body image and body schema: A conceptual clarification. J. Mind Behav. 1986, 7, 541–554. [Google Scholar]
- Iriki, A.; Tanaka, M.; Iwamura, Y. Coding of modified body schema during tool use by macaque postcentral neurones. Neuroreport 1996, 7, 2325–2330. [Google Scholar]
- Maravita, A.; Clarke, K.; Husain, M.; Driver, J. Active tool use with the contralesional hand can reduce cross-modal extinction of touch on that hand. Neurocase 2002, 8, 411–416. [Google Scholar] [CrossRef]
- Melaisi, M.; Nguyen, M.; Uribe, A.; Kapralos, B. The effect of sound on haptic fidelity perception. In Proceedings of the 2017 IEEE Global Engineering Education Conference (EDUCON), Athens, Greece, 25–28 April 2017; pp. 714–717. [Google Scholar]
- Parsons, T.D. Virtual reality for enhanced ecological validity and experimental control in the clinical, affective and social neurosciences. Front. Hum. Neurosci. 2015, 9, 660. [Google Scholar] [CrossRef] [Green Version]
- Laurienti, P.J.; Kraft, R.A.; Maldjian, J.A.; Burdette, J.H.; Wallace, M.T. Semantic congruence is a critical factor in multisensory behavioral performance. Exp. Brain Res. 2004, 158, 405–414. [Google Scholar] [CrossRef]
- Hébert, S.; Béland, R.; Dionne-Fournelle, O.; Crête, M.; Lupien, S.J. Physiological stress response to video-game playing: The contribution of built-in music. Life Sci. 2005, 76, 2371–2380. [Google Scholar] [CrossRef]
- Lipscomb, S.D.; Zehnder, S.M. Immersion in the virtual environment: The effect of a musical score on the video gaming experience. J. Physiol. Anthropol. Appl. Hum. Sci. 2004, 23, 337–343. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sanchez-Vives, M.V.; Slater, M. From presence to consciousness through virtual reality. Nat. Rev. Neurosci. 2005, 6, 332. [Google Scholar] [CrossRef] [PubMed]
- Witmer, B.G.; Singer, M.J. Measuring presence in virtual environments: A presence questionnaire. Presence Teleoper. Virtual Environ. 1998, 7, 225–240. [Google Scholar] [CrossRef]
- Baumgartner, T.; Valko, L.; Esslen, M.; Jäncke, L. Neural correlate of spatial presence in an arousing and noninteractive virtual reality: An EEG and psychophysiology study. CyberPsychol. Behav. 2006, 9, 30–45. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gregory, R. Origin of eyes and brains. Nature 1967, 213, 369–372. [Google Scholar] [CrossRef] [PubMed]
- Posner, M.I.; Nissen, M.J.; Klein, R.M. Visual dominance: An information-processing account of its origins and significance. Psychol. Rev. 1976, 83, 157. [Google Scholar] [CrossRef]
- Hecht, D.; Reiner, M. Sensory dominance in combinations of audio, visual and haptic stimuli. Exp. Brain Res. 2009, 193, 307–314. [Google Scholar] [CrossRef]
- Hartcher-O’Brien, J.; Gallace, A.; Krings, B.; Koppen, C.; Spence, C. When vision ‘extinguishes’ touch in neurologically-normal people: Extending the Colavita visual dominance effect. Exp. Brain Res. 2008, 186, 643–658. [Google Scholar] [CrossRef]
- Lin, C.-L.; Shaw, F.-Z.; Young, K.-Y.; Lin, C.-T.; Jung, T.-P. EEG correlates of haptic feedback in a visuomotor tracking task. NeuroImage 2012, 60, 2258–2273. [Google Scholar] [CrossRef]
- Faul, F.; Erdfelder, E.; Lang, A.-G.; Buchner, A. G*Power 3: A flexible statistical power analysis program for the social, behavioral, and biomedical sciences. Behav. Res. Methods 2007, 39, 175–191. [Google Scholar] [CrossRef]
- Knox, J.J.; Hodges, P.W. Changes in head and neck position affect elbow joint position sense. Exp. Brain Res. 2005, 165, 107–113. [Google Scholar] [CrossRef] [PubMed]
- Burkitt, J.J.; Staite, V.; Yeung, A.; Elliott, D.; Lyons, J.L. Effector mass and trajectory optimization in the online regulation of goal-directed movement. Exp. Brain Res. 2015, 233, 1097–1107. [Google Scholar] [CrossRef] [PubMed]
- Guth, D. Space Saving Statistics: An Introduction to Constant Error, Variable Error, and Absolute Error. Peabody J. Educ. 1990, 67, 110–120. [Google Scholar] [CrossRef]
- Richardson, J.T. Eta squared and partial eta squared as measures of effect size in educational research. Educ. Res. Rev. 2011, 6, 135–147. [Google Scholar] [CrossRef]
- Engelbrecht, S.E.; Berthier, N.E.; O’Sullivan, L.P. The Undershoot Bias: Learning to Act Optimally under Uncertainty. Psychol. Sci. 2003, 14, 257–261. [Google Scholar] [CrossRef] [PubMed]
- Roberts, J.W.; Burkitt, J.J.; Elliott, D.; Lyons, J.L. The impact of strategic trajectory optimization on illusory target biases during goal-directed aiming. J. Motor Behav. 2016, 48, 542–551. [Google Scholar] [CrossRef] [PubMed]
- Lyons, J.; Hansen, S.; Hurding, S.; Elliott, D. Optimizing rapid aiming behaviour: Movement kinematics depend on the cost of corrective modifications. Exp. Brain Res. 2006, 174, 95–100. [Google Scholar] [CrossRef]
- Elliott, D.; Hansen, S.; Mendoza, J.; Tremblay, L. Learning to optimize speed, accuracy, and energy expenditure: A framework for understanding speed-accuracy relations in goal-directed aiming. J. Motor Behav. 2004, 36, 339–351. [Google Scholar] [CrossRef]





© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Grant, B.L.; Yielder, P.C.; Patrick, T.A.; Kapralos, B.; Williams-Bell, M.; Murphy, B.A. Audiohaptic Feedback Enhances Motor Performance in a Low-Fidelity Simulated Drilling Task. Brain Sci. 2020, 10, 21. https://doi.org/10.3390/brainsci10010021
Grant BL, Yielder PC, Patrick TA, Kapralos B, Williams-Bell M, Murphy BA. Audiohaptic Feedback Enhances Motor Performance in a Low-Fidelity Simulated Drilling Task. Brain Sciences. 2020; 10(1):21. https://doi.org/10.3390/brainsci10010021
Chicago/Turabian StyleGrant, Brianna L., Paul C. Yielder, Tracey A. Patrick, Bill Kapralos, Michael Williams-Bell, and Bernadette A. Murphy. 2020. "Audiohaptic Feedback Enhances Motor Performance in a Low-Fidelity Simulated Drilling Task" Brain Sciences 10, no. 1: 21. https://doi.org/10.3390/brainsci10010021