- Research
- Open access
- Published:
Target coverage through distributed clustering in directional sensor networks
EURASIP Journal on Wireless Communications and Networking volume 2015, Article number: 167 (2015)
Abstract
Maximum target coverage with minimum number of sensor nodes, known as an MCMS problem, is an important problem in directional sensor networks (DSNs). For guaranteed coverage and event reporting, the underlying mechanism must ensure that all targets are covered by the sensors and the resulting network is connected. Existing solutions allow individual sensor nodes to determine the sensing direction for maximum target coverage which produces sensing coverage redundancy and much overhead. Gathering nodes into clusters might provide a better solution to this problem. In this paper, we have designed distributed clustering and target coverage algorithms to address the problem in an energy-efficient way. To the best of our knowledge, this is the first work that exploits cluster heads to determine the active sensing nodes and their directions for solving target coverage problems in DSNs. Our extensive simulation study shows that our system outperforms a number of state-of-the-art approaches.
1 Introduction
A directional sensor network (DSN) is composed of a large number of directional sensor devices that send sensed-event reports to a sink. Unlike omnidirectional sensors, the directional sensors have limited range of sensing and communication angles. They promote sensing and communication qualities by focusing transmission in one direction and thus enhance the network performance by increasing the sensing quality and reducing interference and fading. Therefore, there has been a great interest in using directional antennas on sensor nodes to improve the network performances. We can use directional sensors in several real-world applications like agriculture field monitoring, military surveillance, infrastructure monitoring, etc. In such environments, we have a fixed number of targets for which we need a dynamic algorithm which can select the optimal number of active sensor nodes for monitoring the targets. For instance, in an agricultural field, each tree in a fruit garden might be considered as a sensing target, where a huge number of directional sensor nodes is needed to be deployed. Multimedia and smart camera sensors [1] and the sensors that provide sensing through ultrasonic or infrared [2, 3] are widely used directional sensors. The sensing target coverage determines the percentage of targets from which events are reported to the base station. For guaranteed coverage and event reporting, the underlying mechanism must ensure that all targets are covered by the sensors and the resulting network is connected. Gathering nodes into clusters might provide a solution to this problem in an energy-efficient way.
The sensing coverage problem has been well studied in omnidirectional sensor networks [4–7]. However, this issue, in directional sensor networks, has newly attracted the research community [8, 9]. The coverage difficulties of directional sensor networks include the limited angle of view, working direction, and line-of-sight (LoS) properties. Three types of coverage problems have been investigated in the literature: area coverage [8, 10–13], target coverage [14–17], and barrier coverage [9, 18, 19]. Among those, the target coverage is the most important application in the domain. In [15] and [16], the multiple directional cover set (MDCS) problem of organizing the directions of sensors into a group of non-disjoint cover sets for the all the targets in order to extend the network lifetime has been solved in distributed and centralized ways, respectively. In the distributed greedy algorithm (DGA) [14], the authors addressed the problem of maximum target coverage with minimum number of sensors (MCMS), which is an NP-complete problem. They provide approximate centralized greedy algorithm (CGA) and DGA solutions to the problem. In all the above solutions, either the sink or the individual sensor nodes run the target coverage algorithms in centralized and distributed solutions, respectively. The first category suffers from communication overheads and is not scalable, while the second one suffers from computation overhead and poor sensing coverage problems. None of them consider the importance of utilizing the cluster heads in minimizing the number of active sensing nodes and determining their directions to maximize the target coverage.
In this paper, we design a target coverage algorithm through distributed clustering mechanism, namely TCDC, for a directional sensor network in an energy-efficient way. At first, we form clusters in the whole network that builds the data communication backbone. For this, each TCDC sensor node calculates its cluster head selection priority (CSP), separately for each communication sector, which is a function of the number of neighbor nodes in that sector, its own residual energy, and its distance from the sink node. The sector, in which a node determines it has the highest priority among its neighbors, is selected as its communication sector, and the node declares itself as the cluster head (CH). Later, each CH collects the target coverage information in different sensing directions for all of its member nodes and then runs an algorithm to determine the number of active sensing nodes and their sensing directions. We prove that this CH-based solution yields a better result for the problem of maximum target coverage with minimum number of sensing nodes. In this solution model, the computation overheads for each sensor nodes have been transferred to the CH, minimizing the energy consumption significantly, and it increases the scalability of the network.
The main challenge of our work is to design a distributed algorithm for selecting the cluster heads and ensure their proper utilization in enhancing the target coverage in DSNs. Cluster formation in directional sensors is very difficult because of their limited field of views, working directions, and line-of-sight property. Cluster formation includes CH and gateway selection which requires a better technique that guarantees network connectivity so that the data of the target coverage could be delivered to the sink properly. Since the sensing antenna for target coverage is also directional, optimizing the active sensing nodes and their sensing sectors, through minimizing the sensing redundancy, is also very difficult.
The major contributions of this paper are summarized as follows:
-
The novelty of this work lies in designing a CH-based solution model for the problem of maximum target coverage using minimum number of sensor nodes in directional sensor networks.
-
The CH-based determination of sensing sectors, for each TCDC active sensing nodes, decreases the communication and computation overheads of energy-constrained sensor devices.
-
The CH-based improvement of the number of active sensing nodes in TCDC minimizes the sensing redundancy and maximizes the number of sleeping nodes in the network.
-
We also develop efficient schemes for renewal of CHs, sensing nodes, and gateways, thus promoting the balanced energy consumption in the network and thereby increasing the network lifetime.
-
The results of performance evaluations, carried out in ns-3 [20], show that our proposed TCDC system achieves better performances compared to state-of-the-art protocols in terms of the number of active sensing nodes, sensing coverage, standard deviation of residual energy, and network lifetime.
The remainder of the paper is organized as follows. In Section 2, we discuss the state-of-the-art works on target coverage problems in directional sensor networks, and Section 3 presents the network model and assumptions. In Section 4, we formulate our proposed clustering which is derived from [21], gateway selection, and target coverage algorithms for directional sensor networks, and energy consumption analysis for the network is presented in Section 5. We carry out performance evaluation of the studied algorithms in ns-3 [20] in Section 6, and we conclude the paper in Section 7.
2 Related work
Sensing coverage is a fundamental problem and has aroused great interest from the industrial and academic community. Three types of coverage problem have been investigated: (1) area coverage [8, 10–13, 22], (2) target coverage [14–16, 23, 24], and (3) barrier coverage [9, 18, 19]. The primary research area relates to our work: target coverage using distribute clustering in a directional sensor network. A MAC protocol, namely DCDMAC (Duty Cycle Direction MAC), is proposed in [25].
A number of target coverage algorithms have been proposed in directional sensor networks. The authors of [14] were among the first to investigate the directional coverage problem. They want to solve the problem of maximum coverage with minimum sensor (MCMS) in terms of the number of targets using two algorithms, centralized greedy algorithm (CGA) and distributed greedy algorithm (DGA).
In DGA, all the sensor nodes gather information on the current state and orientation in the network. Using the priority calculated by the number of targets, one sensor node selects its sensing sector. Therefore, there is no coordinator to select the sensing sector for the nodes. Besides, they only use the number of targets as a priority for determining the sensing sector. They also provide SNCS (Sensing Neighborhood Cooperative Sleeping Protocol) which helps in the scheduling of the sensor nodes for energy efficiency. Here, they use the residual energy as a priority for scheduling, and all the sensor nodes run the same DGA algorithm again. Thus, this scheduling mechanism incurs much overhead in the network and decreases the network lifetime as well as performance. As there is no coordinator, the number of messages and information transmission increases and high computational overhead of the sensor nodes has been observed in the network.
The authors of [23] have studied the multiple directional cover set (MDCS) problem. They tried to organize the directions of the sensors into a group of non-disjoint cover sets to extend the network lifetime. One cover set in which the directions cover all the targets is activated at one time. They designed three algorithms—Progressive, Prog-Resd, and Feedback—in order to prolong the network lifetime with fewer cover sets that are more efficient in practice.
The Progressive algorithm used the idea of this paper [16] of omnidirectional networks for the problem of MDCS. They modify the algorithm to solve the problem of MDCS in directional sensor networks. Prog-Resd takes into consideration the residual lifetime of sensors. This algorithm is different from the Progressive algorithm only in the direction selection process. The Feedback algorithm finds fewer cover sets since it utilizes the results obtained from the previous iterations and finds a group of cover sets in the last iteration. It generates no more than K cover sets which also prolong the network lifetime.
The maximal network lifetime scheduling (MNLS) problem is addressed in the work conducted in [5]. The authors investigate a special target coverage problem where each target has a required coverage quality. They consider that the distance between the sensor and the target influences the coverage quality of the target. They proposed two heuristic greedy algorithms (MNLS-H and MNLS-H-T) for this problem. They wanted to organize the directions into non-disjoint cover sets, and one cover set was activated at a time covering all the targets.
In [26], the authors address the priority-based target coverage in a randomly deployed directional sensor network. They assume that each target may have different coverage quality requirements. To solve this problem, they propose a learning-automata-based algorithm to organize the directional sensors into several cover sets in such a way that each cover set can satisfy coverage quality requirements of all the targets, maximizing the network lifetime.
A greedy approximate algorithm for the maximum directional sensor coverage (MDSC) problem is proposed in [27]. They also propose the MKDSC (maximum K directional sensor cover) algorithm selecting and assigning directions for a subset of K sensors such that the number of covered target points is maximized.
So, there have been many algorithms for target coverage in directional sensor networks, but none of them utilize the cluster head in order to have a solution of the MCMS problem.
Only a few papers consider the cluster formation in directional sensor networks. In [28], the authors proposed an autonomous cluster algorithm (ACDA) for forming a cluster to achieve both connectivity and sufficient coverage with directional sensor networks. This ACDA is a randomized distributed algorithm having four phases: phase I: determining the active sensing sectors, phase II: choosing the communication sectors and cluster heads, phase III: selecting the gateways, and phase IV: renewing the cluster head and gateway. In the first phase, each sector of a sensor selects a random sector waiting time (SWT) and broadcasts a Hello message at SWT. After receiving each new Hello message, the SWT is decreased and updated. When the SWT becomes zero on a sector, that sector is selected as the active sector for that particular sensor node. In phase II, each sensor initiates a cluster waiting timer (CWT) that is updated with the help of a number of message transmissions in phase I. A sensor node becomes the cluster head, when the random CWT expires (CWT becomes zero) and none of the neighboring sensors are already members of a cluster. Then, this cluster head broadcasts the message to all its active sectors so that the neighboring sensor nodes can form a cluster joining to the cluster head. In phase III, the operation of gateway selection can be either triggered by cluster heads or initialized by border sensors. There is random gateway waiting time (GWT) which is updated by the number of message receptions in the phase I, and GWT helps to determine the gateway sensor nodes. In the last phase, the re-clustering mechanism is presented. When a cluster head’s energy is below the threshold, the cluster members again generate new waiting times for forming new clusters according to the procedure in phases I and II.
We have identified some issues of ACDA regarding the message passing and network performance. The ACDA uses random waiting time in selecting the cluster head and gateway. Using this random waiting time, a number of messages need to be sent in the network. Besides, the authors of [28] do not consider the residual energy for selecting the cluster head and gateway. In renewing of the cluster head and gateway, the cluster members select their waiting time and start passing messages. Besides, the number of messages passing in the cluster and gateway selection phase and renewing of the cluster and gateway cost a huge energy of the limited battery power of the sensor nodes. However, we provide a better algorithm which will consider the residual energy of the sensor and distance from the sink to calculate the cluster head and gateway in directional sensor networks. Moreover, in our renewing of the cluster and gateway process, the existing cluster head will calculate the priority from the cluster members and select the new cluster head and gateway which will minimize the number of messages passing compared to the autonomous cluster algorithm.
Though many target coverage algorithms have been developed, none has introduced the clustering mechanism in order to solve the target coverage problem in directional sensor networks. Our proposed paper considers network connectivity and coverage and reduces redundancy sensing in order to improve energy efficiency in a hierarchical network structure using clustering.
3 Network model
We assume a directional sensor network (DSN) composed of a large set of directional sensor nodes \(\mathcal {N}\) to cover a set of \(\mathcal {M}\) targets in a two-dimensional plane. The sensors are deployed with random distribution. The DSN has a sink node, to which all sensor devices send their sensed data in multi-hop fashion. Each sensor S i has a fixed and known location (x i ,y i ), determined by GPS or any other localization method [29]. Each sensor device is uniquely identified by its ID. We also assume that all the directional sensor nodes are homogeneous in terms of the number of sensing sectors, the sensing and communication radius, and the initial energy E 0. A sensor node can be in the active or sleeping state. When in the sleeping state, a sensor node periodically wakes up and communicates with its cluster head to check the neighbor communication and sensing coverage.
3.1 Directional sensing model
Each sensor has a set of sensing orientations or sectors. We can characterize a sensing sector using the following attributes:
-
θ s (0<θ<2π): the maximum sensing angle which is called field of view (FOV), as shown in Fig. 1 a
Fig. 1 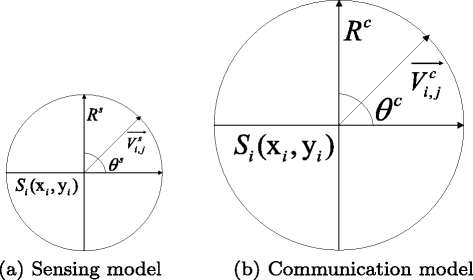
The directional sensing and communication models. a Sensing model and b communication model
-
\({V}^{s}_{i,j}\): the directional vector, which is the center line of the sensing sector
-
R s: the maximum sensing radius, beyond which a sensor cannot sense any target. Each sensor knows the locations of the targets within its sensing range R s

3.2 Directional communication model
Each sensor also has a set of communication orientations or sectors. We can characterize a communication sector using the following attributes:
-
θ c (0<θ<2π): the maximum communication angle
-
\(\mathbf {V}^{c}_{i,j}\): the directional vector which is the center line of the communication sector, as shown in Fig. 1 b
-
R c: the maximum communication radius, typically, R c≥2R s.
We also assume that each sensor node knows the location of its neighbor. We adopt the following notations throughout the paper:
-
\(\mathcal {N}\): the set of sensor nodes in the network
-
S i : the ith sensor, \(1 \le i \le N, S_{i} \in \mathcal {N}\)
-
Ψ S : the set of sensing sectors of a sensor device
-
Ψ C : the set of communication sectors of a sensor device
-
E i : the residual energy of sensor \(S_{i} \in \mathcal {N}\)
-
E 0: the initial energy of all sensors, \(\forall i, S_{i} \in \mathcal {N}\)
-
n i,s : the set of neighbors in sector s of sensor \(S_{i} \in \mathcal {N}\)
-
\(n^{\text {oc}}_{i,s}\): the set of neighbors, which are members of other clusters, in sector s of sensor \(S_{i} \in \mathcal {N}\)
-
d(S i ,S j ): Euclidean distance between sensors S i and S j
-
CSP i,s : cluster head selection priority of S i in sector s
-
TCP i,s : target coverage priority of S i in sector s
-
GSP i,s : gateway selection priority of S i in sector s
-
n k,wcs: the set of sensor nodes that belong to working communication sector (wcs) of cluster head S k
-
T i,s : the set of targets covered by a sensor S i under sector s, \(T_{i,s}\subset \mathcal {M}\)
-
α k : the set of member sensor nodes of cluster head S k including the cluster head itself
-
SP k : the set of sleeping member nodes of CH S k
Definition 1.
A target T j is covered by sensor S i if and only if the angle between S i T j and V i,s in sector s of sensor S i is within [ −θ/ 2, θ/2] and d(S i ,T j )≤R s.
Definition 2.
A sensor S i is neighbor of sensor S j if and only if the angle between S j S i and V j,s in sector s of sensor S j is within [ −θ/ 2, θ/2], and d(S j ,S i )≤R c.
Definition 3.
The working sectors for sensing and communications of a sensor are the directions in which it is currently sensing the targets and communicating with the cluster head, respectively.
Definition 4.
The cover set of a cluster head S k is defined as the set of active sensor nodes required to cover the targets. We also define the optimal cover set of a TCDC cluster head S k as the set having the lowest number of sensor nodes for covering maximum number of targets while increasing the network lifetime.
Definition 5.
The network lifetime of a directional sensor network is the time difference from the time of network deployment up to which all the sensors in the network satisfy the following condition:
4 Target coverage through distributed clustering
In this section, we present an energy-efficient solution to the MCMS problem through the distributed clustering mechanism in directional sensor networks. There are four phases in our algorithm:
-
Cluster formation. In this phase, cluster heads and communication sectors for each member sensor node are selected. Each sensor node \(S_{i} \in \mathcal {N}\) calculates its CSP i,s in each communication sector s∈Ψ C and determines whether it would be a potential CH for the neighborhood sensor nodes or not.
-
Gateway selection. Gateways (GW) are used for inter-cluster communication. Each CH k calculates GSP i,s in each communication sector s∈Ψ C for all of its members in α k and selects a member as the gateway node having maximum GSP i,s value to communicate with the neighbor clusters.
-
Target coverage. In this phase, each CH k calculates TCP i,s in each sensing sector s∈Ψ S for all of its members in α k and selects the active sensor nodes and their sensing sectors that cover the targets; the rest of the member nodes go to the low-power sleep state.
-
Improvement. Here, we reduce the sensing redundancy for target coverage that would increase the number of sleeping nodes in the network and thus enhances the network lifetime.
In what follows, we describe in detail the solution components of our proposed target coverage through distributed clustering (TCDC) mechanism. The TCDC exploits single-hop neighborhood information only to solve the MCMS problem. The CHs are taking the computation and communication overheads for minimizing the number of active sensing nodes to maximize the coverage. Thus, its operation is fully distributed and uses local neighborhood information only, reducing the overhead. Though our solution model cannot be expected to provide a globally optimal solution, it is more computationally scalable and does not incur high communication overhead.
4.1 Cluster formation
At the start of cluster formation phase, each sensor node \(S_{i} \in \mathcal {N}\) exchanges a neighbor information (NI) message that consists of its (1) ID, (2) Cartesian location, (3) residual energy, and (4) a set of neighbor sensor nodes n i,s in each communication sector, s∈Ψ C . Then, each sensor node calculates cluster head selection priority (CSP) for itself and its neighbors following Eq. 2,
where w 1,w 2,w 3 are weight factors and w 1+w 2+w 3=1; \(N_{\text {max}}^{i}\) is determined as
and d max is the distance of the sink node from the furthest node deployed in the terrain. Thus, it is a system parameter, and its value depends on the size of the terrain and the placement of the sink in the terrain. Since we have assumed static node deployment, the value of d max can be computed at the time of node deployments by the sink and each of the sensor nodes can be communicated accordingly. After that, each sensor node \(S_{i} \in \mathcal {N}\) checks the following condition:
Now, the following actions will be carried out by the sensor devices based on the outcome of Eq. 4 to form clusters throughout the network:
-
Action I. If Eq. 4 returns true for any node \(S_{i} \in \mathcal {N}\), it declares itself as a CH, fixes its working communication sector accordingly, and starts forming a cluster. This new CH sends a cluster head formation (CHF) message to its neighbors that contains (1) the CH ID, (2) the working communication sector ID, and (3) the set of neighbors in the working communication sector.
-
Action II. When a sensor node S j ∈n i,s receives a CHF message from S i , it checks whether it is in the working communication sector of the new cluster head S i . If yes, it selects its working communication sector facing toward S i and sends a target coverage information (TCI) message to S i ; it also broadcasts a cluster membership (CM) message to its single-hop neighbors. Otherwise, a sensor node S j updates CSP for itself and its neighbors in all sectors following Eq. 2. Note that the TCI message from a cluster member node consists of its (1) ID, (2) CH ID, and (3) the set of covered targets in each sector; also, the CM message consists of the (1) sensor ID and (2) cluster ID.
-
Action III. When a sensor node receives a CM message, it updates CSP for itself and its neighbors in all sectors following Eq. 2.
The pseudo-code of the cluster formation procedure is presented in Algorithm 1. An illustrative example of the cluster formation procedure is depicted in Fig. 2. Suppose sensor A has the highest CSP among its neighbors and it creates a cluster with member sensors B and C. Similarly, sensor E also creates a cluster with member sensors F and G. But sensor D has no free neighbors, and thus, it creates a single node cluster.

An example of cluster formation. a Before cluster formation and b after cluster formation

The worst case complexity of Algorithm 1 (cluster head selection) for a sensor node \(S_{i} \in \mathcal {N}\) is computed as \(\mathcal {O}\)(|n j,s |×|Ψ C |), ∀s∈Ψ C where, n i,s is the set of neighbor sensor nodes of \(S_{i} \in \mathcal {N}\) in direction s∈Ψ C . This is because the sensor \(S_{i} \in \mathcal {N}\) experiences the highest computation penalty if it declares itself as CH or member of any other CH at last.
4.2 Gateway selection
Once the clusters are formed, gateway nodes need to be selected in order to communicate in between the nearby clusters so that a network backbone is developed for data communication toward the sink node. Each CH selects a sensor node as its gateway to communicate with another cluster. A sensor S i can be a candidate gateway node of a CH S k if it can communicate directly with a nearby cluster head or through a member of other clusters. A CH computes gateway selection priority (GSP) for all candidate gateway nodes (in their all communication sectors) as follows:
where w 1, w 2, w 3 are weight factors and w 1+w 2+w 3=1. Now, a CH S k selects a sensor node S i as a gateway node if and only if the node satisfies the following condition:
where n k,w c s is the set of sensor nodes that belong to the working communication sector (wcs) of cluster head S k . Thus, a CH S k selects the most optimal gateway node S i using single-hop neighborhood information and lightweight computations. After that, CH S k broadcasts a gateway selection (GS) message in its working communication sector which is a two-tuple message: <G a t e w a y I d, G a t e w a y S e c t o r I d>. Note that Eq. 5 is a linear combination of three submatrices—energy, number of neighbor nodes of other clusters, and distance to the sink node. Thus, in selecting a gateway node, the CH maximizes the node’s residual energy and the number of neighbor nodes of other clusters, and minimizes its distance to the sink node.
An example of the gateway selection process is described below using Fig. 3. Suppose a sector of sensor F has the highest GSP than other members of CH E. Therefore, the node F is selected as the gateway for this cluster that can communicate with sensor C, which is a member of CH A. However, CH D has no member sensor nodes that can be used as gateway; it can directly communicate with CH A using an appropriate communication sector.

An example of gateway node selection
In the process of solving the MCMS problem in our proposed TCDC system, we now exploit each CH to select the sensor nodes and their active sectors for target coverage. Therefore, our proposed Algorithm 2 for target coverage (to be presented in Section 4.3) can be executed only when the clusters are formed throughout the network by executing Algorithm 1.
4.3 Target coverage
The novelty of our proposed TCDC system is to solve the target coverage problem using the knowledge acquired by the cluster heads. Each CH translates the target coverage problem into determining optimal sensing sectors for its member nodes so that all targets can be covered by a minimum number of sensing nodes. A CH S k computes a target coverage priority (TCP) metric for all of its member nodes in α k for all sensing directions s∈Ψ S as follows:
where c 1 and c 2 are the weight factors for target coverage prioritization and c 1+c 2=1; T i,s is the set of targets covered by a sensor S i in sensing direction s, and \(T_{\text {max}}^{k}\) is the maximum number of targets covered by any member sensor node of CH S k and it is determined as follows:
Note here that for computing TCP of member nodes, each CH exploits only local information—member node’s residual energy (E i ) and their target coverage information (TCI), acquired during cluster formation, as discussed in Section 4.1.
Then, a CH S k determines a sensing node S i and its working sensing sector that satisfies the following condition:
where n k,wcs is the working communication sector of CH S k . Then, CH S k sends a sensing sector selection (SSS) message to the selected member node S i so that the latter can set its sensing direction accordingly, as stated in line no. 14 of Algorithm 2. In the meantime, the CH updates TCP, using Eq. 7, for the updated set of member nodes, α k , and target set T i,s , as stated in line nos. 4–10 in Algorithm 2. Thus, our target coverage algorithm runs until α k becomes null or all the targets are covered. After that, the CH sends a Sleep message (SM) to the rest of the member sensor nodes that are neither responsible for covering any target nor selected as gateway, as stated in line nos. 12–19 of Algorithm 2, which helps to prolong the network lifetime. As shown in Fig. 4, the sensing sectors of the CH and the two member sensor nodes A and B are determined to cover all the five targets, and the node C goes to sleep mode.

An example of sensing sector selection. a Before sensing sector selection and b after selection

The complexity of Algorithm 2 (target coverage algorithm) is computed as \(\mathcal {O}\)(|α k |2×|Ψ S |). This is the worst case complexity of target coverage algorithm of each CH in the network, when all of its member sensor nodes S i ∈α k are selected as active sensing nodes. Furthermore, the best case complexity is \(\mathcal {O}\)(|α k |×|Ψ S |); it happens if all the targets are covered by activating a single sensor node S i ∈α k only.
Theorem 1.
The proposed TCDC system creates an optimal cover set for each cluster.
Proof.
We use proof by contradiction. Assume that the TCDC system does not choose the local optimal cover set O k , i.e., ∃S k that selects a cover set C k where C k ⊄O k .
To determine the nodes in a cover set, each cluster head S k calculates TCP for ∀S i ∈α k and creates a set A={s 1,s 2,s 3,…s n |n=|α k | and TCP(s 1)>TCP(s 2)>TCP(s 3)…TCP(s n −1)>TCP(s n )}. The CH then selects the first node from this sorted list and updates the TCP values for all other nodes, then sorts them again. This process continues until all targets are covered or there remains any member node, which is not yet selected. Therefore, the TCDC system ensures that there will be no other possible optimal cover set C k for any cluster head S k in terms of target coverage and network lifetime, captured by the measurement of TCP values. But it contradicts our initial assumption.
4.4 Improvement
One of the major limitations of our target coverage algorithm, described in Section 4.3, is that a target can be covered by multiple sensor nodes, and thus, redundant sensed data will be sent to the sink, causing wastage of bandwidth and energy. This redundant sensing can be found within the members of one cluster or neighbor clusters, as illustrated in Fig. 5. In Fig. 5 a, the target T 3 is sensed by two sensor nodes E and F, and both are members of cluster head D; hence, it is an intra-cluster duplicate coverage issue. Figure 5 b shows that the target T 3 is covered by sensor nodes E and F, and now they are members of different cluster heads D and G. Therefore, it causes an inter-cluster duplicate coverage problem. In this section, we design a mechanism that reduces redundant data flow to the sink.

Redundant sensing coverage problem. a Intra-cluster and b inter-cluster
The intra-cluster duplicate coverage problem is solved as follows. At first, a cluster head finds the targets that are covered by multiple sensing nodes. Then, for each such target, it searches for the corresponding sensing node that has the highest TCP value, which will be responsible for covering the target, and the rest of the lower priority sensing nodes will be in the block list for that target. Thus, the CH can produce a block list table, <B l o c k e d s e n s o r n o d e I D, T a r g e t I D(s)>, for all the block listed sensor nodes. Now, for each block listed sensor node, the CH checks whether the total number of targets covered by the sensor is equal to the total number of targets for which it is block listed. If yes, the CH sends a SM to that node for energy saving; otherwise, it sends a block list (BL) message (containing the target ID(s)) to that sensor node so that the latter can ignore sending data for that target.
The solution to the inter-cluster duplicate coverage problem necessitates the neighbor clusters to exchange their CSP values, member list, target IDs covered by the members, and their TCP values. Following the same procedure used in the intra-cluster duplicate coverage problem, each CH determines the sensor nodes that can go to sleep mode and ignores sending data for a specific target. If the TCP values of the member nodes in different clusters, which have duplicate coverage, are the same, then the conflict resolution works as follows: the CH having a lower CSP value performs the further actions. Thus, our proposed TCDC system would save a significant amount of energy and network bandwidth wastage through lightweight improvements.
4.5 Periodic scheduling of nodes
In this section, we present re-scheduling of cluster heads, gateways, and sensing nodes to prolong the network lifetime.
4.5.1 4.5.1 Cluster head renewing
When the residual energy of a cluster head S k , RE k , becomes lower than a predefined threshold value \(\text {RE}_{\text {th}}^{k}\), i.e., \(\text {RE}_{k} < \text {RE}_{\text {th}}^{k}\), then the CH collects neighbor information (NI) from its member nodes to elect a new CH. Then, it calculates CSP for each of its member nodes and thus selects a new CH S i , which satisfies the following condition:
In case the newly formed cluster head does not cover all the existing members, another CH may need to be selected, following the same procedure. The old CH now becomes an ordinary member sensing node and updates its energy threshold as follows: \(\text {RE}_{\text {th}}^{k} = \frac {1}{2} \text {RE}_{\text {th}}^{k}\). This is done to decrease the possibility of taking the responsibility CH by the same node again. Therefore, the energy load distribution among the network nodes will be more balanced.
For example, in Fig. 6 a, when the residual energy of cluster head A becomes less than a predefined threshold, the renewal process of CH starts and two new clusters are formed (CH C and CH B), as shown in Fig. 6 b.

Renewing cluster head. a Before renewing CH and b after renewing CH
Also, note that in the renewal process of cluster heads in our proposed TCDC system for directional sensor networks, we do not run the cluster formation Algorithm 1 in all the member nodes. The old cluster head collects NI information from the member sensor nodes and handover the CH responsibility to another node(s). Furthermore, the above CH renewing process decreases the communication and operation overheads through using localized information and computation. Thus, it does not incur much more energy overheads.
To ensure the coverage of the targets of the incumbent region, where new CH(s) has been formed, the proposed TCDC system locally runs the gateway selection mechanism, target coverage algorithm (Algorithm 2), and the coverage redundancy minimization phases. The above process may include the coverage of any unattended targets or lose a target covered by the previous clusters. Thus, it is expected that the members of the new CH(s) would retain a good level of target coverage in the changed region.
4.5.2 4.5.2 Sensing node scheduling
The residual energy of the cluster member nodes may also go below the threshold value. In that case, it sends a message to its cluster head requesting to select a new member from the sensors that are in sleep mode. The CH will search for the replacement of the dying node from the member nodes in the sleeping mode using Eq. 9.
4.5.3 4.5.3 Gateway renewing
If the residual energy of the gateway node becomes less than the threshold value, it sends a message to the cluster head to select a new gateway in the same way as described in Section 4.2.
4.6 Discussion
In this section, we discuss on the parameter selection and weight factors in Eqs. 2, 5, and 7.
4.6.1 4.6.1 Parameter selection
The rationale to define the aggregated weight function in Eq. 2 is to maximize CSP, which is a linear combination of three parameters. The first parameter of Eq. 2 denotes how much fraction of the residual energy is remaining over the initial energy, the second parameter represents the density of the neighbor nodes, and the third parameter is corresponding to the distance of a sensor node from the sink. Thus, the maximization of the linear sum of these three parameters for different sensors (see Eq. 4) guarantees that a node will be selected as a CH having higher residual energy, greater number of cluster members, and reduced hop count to the sink. Similarly, in Eq. 5, the number of neighbor sensor nodes of different clusters has been considered (see the second parameter) that ensures better selection of a gateway node for inter-cluster communication. Also, in Eqs. 7 and 9, the maximization of the second parameter increases the target coverage percentage. The performances of the aggregated priority metrics, derived from Eqs. 2, 5, and 7, are largely dependent on the values of the chosen weight factors, which we discuss below.
4.6.2 4.6.2 Weight factors
Setting appropriate values for the weight factors w 1,w 2,w 3,c 1, and c 2 is very important for achieving optimal solutions to clustering and coverage problems that we have addressed in this work. The weight factors correspond to complex multivariable functions, and their optimal values are dynamic depending on the time-varying network environment parameters. Therefore, the problem can be modeled as a simulation optimization problem, where the objective function cannot be evaluated exactly. Adaptive random search methods for the simulation optimization problem, which can maintain balance among exploration, exploitation, and estimation, are more effective [30, 31]. However, the development of an adaptive and almost surely convergent search method for our problem leads to a new research work. Therefore, we have gone for the estimation based on performing a lot of simulation runs (transient simulation) for a substantially longer period of time. We run our simulations for different values of these weight factors, network size, node density, and initial node energy. The experiments state that the following values for the weight factors increase the overall performance of our TCDC system: w 1=0.45,w 2=0.35,w 3=0.20,c 1=0.6, and c 2=0.4, determined through numerous simulation runs for different network size, node density, and initial node energy values as in [32].
5 Energy consumption analysis
This section presents energy consumption analysis in each phase of the proposed TCDC system. We assume that the energy needed to transmit and receive a message of 1 bit for each sensor with omnidirectional antennas is E T and E R, respectively. Thus, the energy consumption to transmit a 1-bit message for a directional sensor is calculated as \(\frac {E_{\mathrm {T}}}{|\Psi _{\mathrm {C}}|}\).
The transmission energy of a node that covers a neighborhood of radius R c is given by
where E TE is the energy per bit needed by the transmitter electronics, E TA is the energy consumption of the transmitting amplifier to send 1 bit over one unit distance, and α(1.6≤α≤0.6) is the path loss factor depending on the radio frequency environment. For all nodes closer than \(R^{c}_{\text {min}}=\left (\frac {{E_{\mathrm {T}}[\text {min}]}^{\frac {1}{\alpha }}}{E_{\text {TA}}}\right)\), the energy requirement is constant at E T[min] J/b. Typical values of these parameters are E T=50 nJ/b, E R=50 nJ/b, and E TA=0.0013 nJ/b/m4 when α=4 [33]. The energy per bit needed by receiver electronics is typically E R=E RE=50 nJ/b. There is no difference between listening and receiving in this radio transceiver model.
5.1 Cluster formation
In the cluster formation phase, every sensor node broadcasts an NI message in all its communication sectors, Ψ C . Thus, the total number of NI messages transmitted in this phase is calculated as \(N^{\text {NI}}_{\mathrm {T_{\textit {CF}}}} = |\Psi _{C}| \times |\mathcal {N}|\). In the same way, each sensor receives a message from all of its neighbors in each sectors, and thus, the total number of NI messages received throughout the network is \(N^{\text {NI}}_{\mathrm {R_{\textit {CF}}}} = \sum _{i=1}^{|\mathcal {N}|} \sum _{s=1}^{|\Psi _{C}|} |n_{i,s}|\), where |n i,s | is the number of neighbors of sensor S i in direction s. After selecting the working communication sector, each CH broadcasts a CHF message in all sectors, and thus, the total number of CHF transmissions is \(N^{\text {CHF}}_{\mathrm {T_{\textit {CF}}}} = |\Psi _{C}| \times |\text {CH}|\), where CH is the set of CHs formed, and the corresponding total number of receptions is \(N^{\text {CHF}}_{\mathrm {R_{\textit {CF}}}} = \sum _{i=1}^{|\mathcal {N}|} \sum _{s=1}^{|\Psi _{C}|} |\text {NCH}_{i,s}|\), where NCH i,s is the set of neighbor CHs of sensor S i in sector s. After that, each member node of a CH broadcasts a CM message in all its sectors. Therefore, the total number of CM message transmissions is \(N^{\text {CM}}_{\mathrm {T_{\textit {CF}}}} = |\Psi _{C}| \times |\mathcal {N}-\text {CH}|\) and that of receptions is \(N^{\text {CM}}_{\mathrm {R_{\textit {CF}}}} = \sum _{S_{i} \in (\mathcal {N}-\text {CH})} \sum _{s=1}^{|\Psi {C}|} |n_{i,s}|\). Thus, the total amount of energy consumption in the cluster formation phase is calculated as
where, |NI|, |CHF|, and |CM| represent the size of NI, CHF, and CM messages in bits, respectively.
5.2 Gateway selection
Each CH selects a gateway for inter-cluster communication, and it broadcasts a gateway selection (GS) message to its members. The total number of GS messages for transmission is \(N^{\text {GS}}_{\mathrm {T_{\textit {GW}}}} = |\text {CH}|\) and that for reception is \(N^{\text {GS}}_{\mathrm {R_{\textit {GW}}}} =\sum _{S_{i} \in (\mathcal {N}-\text {CH})} \sum _{s=1}^{|\Psi _{C}|} \text {NCH}_{i,s}\). Therefore, the total amount of energy consumption in this phase is calculated as
where |GS| represents the size of the GS message in bits.
5.3 Target coverage
In this phase, each cluster member sends a TCI message to its cluster head, and thus, the total number of TCI messages transmitted is \(N^{\text {TCI}}_{\mathrm {T_{\textit {TC}}}} = (|\mathcal {N}|-|\text {CH}|)\) and that received is \(N^{\text {TCI}}_{\mathrm {R_{\textit {TC}}}} = \sum _{S_{k}\in \text {CH}} \alpha _{k}\). After a CH determines the active sensing sector for its member nodes, it sends an SSS message to them. The number of SSS messages transmitted is \(N^{\text {SSS}}_{\mathrm {T_{\textit {TC}}}} = |\text {CH}|\) and that received is \(N^{\text {SSS}}_{\mathrm {R_{\textit {TC}}}} =\sum _{S_{i} \in (\mathcal {N}-\text {CH})} \sum _{s=1}^{|\Psi _{S}|} \text {NCH}_{i,s}\). Therefore, the total amount of energy consumption in this phase is calculated as
where |TCI| and |SSS| represent the size of TCI and SSS messages in bits, respectively.
5.4 Renewing of CHs, GWs, and sensing nodes
The periodic scheduling part of TCDC, stated in Section 4.5, runs only in the CHs, to renew cluster heads and gateways, and to change the operation states of sensing nodes. In this phase, the old CH first notifies its members to send NI messages. The total number of NI messages transmitted to CH is \(N^{\text {NI}}_{\mathrm {T_{\textit {rch}}}} = |\alpha _{k}|\) and that of reception is \(N^{\text {NI}}_{\mathrm {R_{\textit {rch}}}} = |\alpha _{k}|\). Once a new CH S k is determined, it broadcasts a CHF message in its working communication sector. Therefore, the total number of CHF message transmissions and receptions is calculated as \(N^{\text {CHF}}_{\mathrm {T_{\textit {rch}}}} = N^{\text {CHF}}_{\mathrm {R_{\textit {rch}}}} = |\alpha _{k}|\). Thus, the total amount of energy consumption in renewing one cluster is calculated as
As stated in Section 4.5, when renewing a gateway node, a cluster head S k collects NI messages from all of its members, determines the new gateway, and broadcasts a GS message in its working communication sector. Thus, the total number of NI and GS message transmissions is calculated as \(N_{\mathrm {T_{\textit {rgw}}}} = |\alpha _{k}| + 1\) and that of reception is \(N_{\mathrm {R_{\textit {rgw}}}} = 2 \times |\alpha _{k}|\). Therefore, the total amount of energy consumption to renew a gateway is calculated as
For renewing the state of a sensing node, the cluster head S k collects TCI messages from the sleeping member nodes during their wake-up intervals. Therefore, the total number of TCI message transmissions is \(N^{\text {TCI}}_{\mathrm {T_{\textit {rss}}}} = |\text {SP}_{k}|\), where SP k is the set of sleeping member nodes in CH S k , and that of reception is \(N^{\text {TCI}}_{\mathrm {R_{\textit {rss}}}} = |\text {SP}_{k}|\). After that, the CH broadcasts an SSS message to its member nodes, as stated in Section 4.5. Thus, the total number of SSS message transmissions is \(N^{\text {SSS}}_{\mathrm {T_{\textit {rss}}}} = 1\) and that of receptions is \(N^{\text {SSS}}_{\mathrm {R_{\textit {rss}}}} = |\alpha _{k}|\). Therefore, the total amount of energy consumption to renew a sensing node is calculated as
The above discussion helps form a mathematical model on the total number of transmitted and received messages and the corresponding analysis of energy consumption in the network.
6 Performance evaluation
6.1 Simulation environment
We evaluate the performances of our proposed TCDC system in ns-3 [20], a discrete-event network simulator, and compare the results with two state-of-the-art works: autonomous clustering via directional antenna (ACDA) [28] and distributed greedy algorithm (DGA) [14]. We deploy the sensors and targets in a region of 1000×1000 m 2 with randomly uniform distribution. The network configuration parameters are shown in Table 1. For each graph points, we run 100 simulation runs and take the average of the results.
6.2 Performance metrics
We have considered the following performance metrics for studying the effectiveness of our proposed TCDC system.
-
Number of cluster heads. We measure the number of cluster heads formed during the clustering algorithm in all the studied protocols, i.e., it represents the number of clusters in the network. The less number of clusters in the network corresponds to the reduced operation overhead.
-
Number of active sensing nodes. We measure the number of active sensing nodes that are required to cover all the targets in the terrain. The less the value is, the more number of sensor nodes can go to sleep mode and conserve energy.
-
Target coverage. The target coverage percentage is measured as the ratio of the number of covered targets to the total number of targets deployed in the terrain. The target coverage is the most important issue in the directional sensor network, and thus, the higher percentage of coverage is expected.
-
Standard deviation of energy. The standard deviation of energy defines the average variance between the residual energy levels on all nodes and is measured by Eq. 18,
$$ \sigma = \sqrt{\frac{1}{|\mathcal{N}|}\sum_{i=1}^{|\mathcal{N}|}(E_{i}-\mu)^{2}}, $$((18))where E i and μ are, respectively, the residual energy of node S i and the mean residual energy for all nodes. Therefore, the value of σ indicates how well the energy consumption is distributed among the sensor nodes. The smaller the value is, the better is the capability of the TCDC system to balance the energy consumption.
-
Network lifetime. Please refer to Definition 5 in Section 3.
6.3 Simulation result
We study the performances for varying the number of sensor nodes deployed in the network and the number of sensing and communication sectors to evaluate the robustness of our proposed TCDC system in different environments. ACDA does not solve the target coverage problem; rather, it solves the area coverage problem, and thus, we do not compare its performance with TCDC with respect to the number of targets covered. Similarly, we cannot compare the performance of our TCDC algorithm with that of DGA for the number of CHs formed since the latter does not implement the clustering mechanism.
6.3.1 6.3.1 Impacts of number of sensor nodes
We measure the performance metrics discussed before for varying the number of directional sensor nodes ranging from 200 to 1000, at an interval of 200 nodes; the number of sectors is kept at 3, and the total number of fixed target is 200.
The graphs in Fig. 7 a show that the number of clusters formed increases with the number of deployed sensor nodes both in ACDA and TCDC. In ACDA, a bit reduced number of clusters is formed compared to our TCDC system since the former considers two-hop neighbors as cluster members. Even though the number of formed clusters is more in our TCDC system, its communication overhead for cluster maintenance, renewing CHs, and gateways, etc. will be much lower compared to that of the ACDA system due to its consideration of one-hop cluster members.

Impacts of number of sensor nodes. a Number of clusters formed. b Standard deviation of residual energy. c Number of active sensing nodes. d Target coverage percentage
Figure 7 b shows the standard deviation of residual energy levels for increasing the number of sensor nodes deployed in the network. The graphs depict that the standard deviation of the residual energy of nodes decreases with the increasing number of nodes deployed in the network since the latter increases the opportunity of getting alternate nodes (having higher residual energy) in the neighborhood that can work as an ordinary sensor or gateway or even as a CH. Our proposed TCDC system gives much better performance than both the ACDA and DGA algorithms. TCDC shows better performance than ACDA because of two reasons: first, ACDA does not consider the residual energy level of nodes when selecting CHs, gateways, and active sensing nodes, and thus, it increases unbalanced energy consumption; second, dynamic update of the residual energy thresholds for selecting/renewing CHs in our TCDC system helps it to ensure balanced energy consumption. On the other hand, the poor selection of active sensing nodes and inefficient mechanism of rescheduling of sensor nodes without having a coordinator are the main reasons why our proposed TCDC algorithm gives better result than DGA.
Figure 7 c shows that our TCDC algorithm is capable of significantly reducing the number of active sensing nodes for covering a fixed number of targets compared to ACDA and DGA; the performance gap increases with the number of deployed sensor nodes, and as much as 50 and 100 % improvement has been observed, respectively. This is the most important achievement of our TCDC algorithm, and it is due to the execution of the target coverage algorithm at the CHs, not at individual sensor nodes. The CHs are playing as controllers for determining active sensors and their sensing directions; thus, more optimal decisions are taken to send many sensors to sleep mode that are covering duplicate targets. Besides, our solution for the inter-cluster and intra-cluster duplicate coverage problem has further decreased the number of active sensing nodes. On the contrary, in the DGA algorithm, individual sensor nodes run the target coverage algorithm and they do not consider the duplicate coverage problem. Thus, the DGA algorithm has poor coordination among the nodes, and it becomes unable to create an optimal sensing coverage. Besides, the efficient mechanism of selecting the communication sector of the sensor nodes with the help of CHs and better rescheduling mechanism of CHs and gateways increases the number of sleep nodes in TCDC compared to the ACDA algorithm. Therefore, a substantial performance improvement by our TCDC system has been achieved.
Figure 7 d reveals that a substantial improvement in terms of target sensing coverage percentage has been achieved by our TCDC algorithm compared to DGA. Our algorithm shows better performance because the CH takes the responsibility of being a coordinator, aggregates the target coverage information (TCI) from the member sensor nodes, and optimizes the best sensing sector for the sensor nodes. Here, a CH has all the target information (that are covered by its member nodes) and runs the target coverage algorithm as a centralized entity, and thus, it can take the most optimal decisions. The graphs in Fig. 7 d show that our algorithm reaches almost 100 % target coverage when the number of deployed sensor nodes increases to 700. It is also evident from all the graphs of Fig. 7 that the confidence interval of our proposed TCDC system is much lower compared to that of the DGA and ACDA systems, i.e., the TCDC system shows better performance stability compared to them.
The comparison of network lifetime offered by TCDC, ACDA, and DGA algorithms is shown in Fig. 8. As expected theoretically, the network lifetime linearly increases with the number of additional sensors deployed in the network for all the studied protocols. Our TCDC system achieves better lifetime compared to the ACDA and DGA algorithms for the following reasons. The TCDC is designed for improving the target coverage through the clustering mechanism, wherein the communication overhead for cluster formation and renewing of CHs, gateways, and sensor nodes is much lower. Furthermore, the sensing coverage duplicity has been intelligently addressed in TCDC.

Impact of number of sensor nodes on network lifetime
6.3.2 6.3.2 Impacts of number of sectors
In this section, we evaluate the impacts of the number of communication and sensing sectors, ranging from 2 to 6, of the sensor devices on the performances of the studied algorithms. In this experiment, we have fixed the number of sensor nodes deployed in the area at 600 and the total number of targets is 100.
Figure 9 a shows the impact of the number of sectors on cluster formation. The graphs show that when the number of sectors is two, the ACDA algorithm forms almost double number of clusters compared to our TCDC algorithm. The reason behind this is that in this case, the random waiting timer used in ACDA is decreased (due to the increased number of neighborhood nodes) for selecting the active communication sector and the cluster head, and thus, the number of members in each cluster is reduced. But the ACDA algorithm forms a bit reduced number of clusters as the number of sectors increases from three to six. Our in-depth look into the simulation trace file reveals that even though the number of formed clusters is a bit more in our TCDC system, its communication overhead for cluster formation and renewing CHs and gateways, etc. is much lower compared to the ACDA system due to its consideration of one-hop cluster members.

Impacts of number of sensing and communication sectors. a Number of clusters formed. b Standard deviation of residual energy. c Number of active sensing nodes. d Target coverage percentage
The graphs in Fig. 9 b state that the standard deviation of residual energy level decreases slowly with the increasing number of sectors for ACDA, DGA, and TCDC algorithms. Our proposed TCDC system gives much better performance than the ACDA and DGA algorithms. As stated in Section 6.3.1 for the number of sensors, the larger number of sectors also increases the number of options from which the CH can choose the optimal one based on priority. Therefore, the energy load will be distributed on many nodes sparsely, reducing the standard deviation.
The number of active sensor nodes is increased with the number of sectors, as depicted in Fig. 9 c. However, in our TCDC algorithm, almost 15 and 25 % less number of sensing nodes remain active compared to the ACDA and DGA algorithms, respectively. This happened due to the following reasons: cluster formation helps the sensor nodes to be coordinated by the CHs, and CHs select the best cover set in solving the MCMS problem. The efficient selection of the communication sectors and the rescheduling mechanism of the cluster head and gateway nodes increase the performance of our proposed algorithm. Besides, the solution to duplicate the coverage problem in TCDC helps it to send a good number of sensor nodes to the sleep state, reducing the active sensing nodes.
Figure 9 d states that the target sensing coverage percentage in both TCDC and DGA slightly decreases with the number of sensing sectors. The increasing number of sectors decreases the number of targets covered by each sector (due to the decreased view of the angle), i.e., the number of targets per sensor is decreased for the whole network, which in turn decreases the probability that a target will be covered by at least one sensor in the network. The graphs also state that our TCDC algorithm performs better than the DGA algorithm despite the increasing number of sectors. In our TCDC system, the CHs run the target coverage algorithm that determines the active sensor nodes and their sensing directions, yielding an optimal cover set for target coverage.
The comparison of network lifetime offered by TCDC, ACDA, and DGA algorithms is shown in Fig. 10 for increasing number of sectors. As expected theoretically, the network lifetime linearly increases with the number of sectors for all the studied protocols since it increases the options of choosing an optimal node based on priority. The other causes are already explained in Section 6.3.1.

Impacts of number of sensing and communication sectors on network lifetime
6.3.3 6.3.3 Impacts of sensing range
We have also studied the comparative performances for varying sensing ranges. In this experiment, we have deployed 600 sensor nodes in the network, each having three sensing and communication sectors. The communication ranges are also increased with the sensing ranges proportionately, i.e., R c=2×R s. The impact of varying sensing range on active sensor nodes is shown in Fig. 11 a. Increasing the sensing range decreases the active sensor nodes on both the TCDC and DGA algorithms; however, our TCDC system provides more than 50 % performance improvement when the sensing range is doubled (from 30 to 60 m). Figure 11 b shows that the sensing coverage increases with the sensing range in both the algorithms, as expected theoretically. While the proposed TCDC system achieves closer to 100 % coverage with the 50 m and above sensing range, the DGA can reach closer to 98 % with the 70 m range and this is caused by non-coordinated selection of sensing nodes and their sectors.

Impacts of sensing and communication ranges. a Number of active sensing nodes. b Target coverage percentage
7 Conclusions
This paper has presented a CH-based distributed target coverage algorithm in directional sensor networks. The proposed TCDC system is the first approach to address the MCMS problem using cluster heads. In the TCDC system, the CHs and gateways are determined first, and then each CH co-ordinates selection of the active sensor nodes and their sensing directions. This work has also addressed the duplicate target coverage problem to optimize the network performance while increasing the network lifetime. Our intelligent and energy-efficient solution to the renewing procedure of CHs, GWs, and sensor nodes is done by the CHs, exploiting single-hop neighborhood information only. Therefore, the absence of a global information exchange scheme reduces the network setup and updating costs and alleviates the possibility of incorrect information at the nodes as changes in system topology occur. Our performance evaluation results also depict that the proposed TCDC system achieves significant improvement over the state-of-the-art techniques in terms of target coverage, network lifetime, etc.
Although the proposed system achieves better performance, further experimental and theoretical extensions are possible. The weight factors in our system need a better mathematical analysis for dynamically selecting their values, and we have left it for our future work.
References
FA Ian, M Tommaso, RC Kaushik, A survey on wireless multimedia sensor networks. Comput. Netw. 51(4), 921–960 (2007).
M Emanuele, Z Andrea, Z Stefano, Z Francesco, P Enrico, in Proceedings of the 2009 IEEE International Conference on Robotics and Automation, ICRA’09. Range-only SLAM with a mobile robot and a wireless sensor networks (IEEE PressPiscataway, NJ, USA, 2009), pp. 1699–1705.
S Robert, M Alan, P Joseph, A John, C David, in Proceedings of the 2nd International Conference on Embedded Networked Sensor Systems, SenSys ’04. An analysis of a large scale habitat monitoring application (ACMNew York, NY, USA, 2004), pp. 214–226.
L Hai, Peng-W Jun, Y Chih-Wei, J Xiaohua, SAM Makki, P Niki, in INFOCOM, Miami, Florida, USA, 13–17 March 2005. Maximal lifetime scheduling in sensor surveillance networks (IEEE, 2005), pp. 2482–2491.
C Ionut, C Mihaela, Energy efficient connected coverage in wireless sensor networks. Int. J. Sen. Netw. 3(3), 201–210 (2008).
W Bang, Coverage problems in sensor networks: a survey. ACM Comput. Surv. 43(4), 32:1–32:53 (2011).
M Seapahn, K Farinaz, P Miodrag, BS Mani, Senior Member. Worst and best-case coverage in sensor networks. IEEE Trans. Mobile Comput. 4, 84–92 (2005).
B Xiaole, K Santosh, X Dong, Y Ziqiu, HL Ten, in Proceedings of the 7th ACM International Symposium on Mobile Ad Hoc Networking and Computing, MobiHoc ’06. Deploying wireless sensors to achieve both coverage and connectivity (ACM,New York, NY, USA, 2006), pp. 131–142.
W Yi, C Guohong, in Proceedings of the Twelfth ACM International Symposium on Mobile Ad Hoc Networking and Computing, MobiHoc ’11. Barrier coverage in camera sensor networks (ACMNew York, NY, USA, 2011), pp. 12:1–12:10.
SK Gaurav, B Yigal, S Saswati, in Proceedings of the 15th Annual International Conference on Mobile Computing and Networking, MobiCom ’09. Lifetime and coverage guarantees through distributed coordinate-free sensor activation (ACM,New York, NY, USA, 2009), pp. 169–180.
M Huadong, Z Xi, M Anlong, in INFOCOM, Rio de, Janeiro, Brazil. A coverage-enhancing method for 3D directional sensor networks (IEEE, 2009), pp. 2791–2795.
Y Zuoming, T Jin, B Xiaole, X Dong, J Weijia, in Proceedings of IEEE INFOCOM. Connected coverage in wireless sensor networks with directional antennas (Shanghai, China, 10), pp. 2264–2272.
S Selina, NN Fernaz, R Abdur, R Mustafizur, in Int’l Conf on Networking Systems and Security (NSysS), Dhaka, Bangladesh. Network life time aware area coverage for clustered directional sensor networks (IEEE, 2015), pp. 1–9.
A Jing, AA Alhussein, Coverage by directional sensors in randomly deployed wireless sensor networks. J. Comb. Optimization. 11, 21–41 (2006).
C Yanli, L Wei, L Minglu, L Xiang-Yang, Energy efficient target-oriented scheduling in directional sensor networks. IEEE Trans. Comput. 58(9), 1259–1274 (2009).
C Mihaela, TT My, L Yingshu, W Weili, in Proceedings of IEEE INFOCOM. Energy-efficient target coverage in wireless sensor networks (Miami, Florida, USA, 13), pp. 1976–1984.
Z Qun, G Mohan, Lifetime maximization for connected target coverage in wireless sensor networks. IEEE/ACM Trans. Netw. 16(6), 1378–1391 (2008).
C Ai, K Santosh, HL Ten, in Proceedings of the 13th Annual ACM International Conference on Mobile Computing and Networking, MobiCom ’07. Designing localized algorithms for barrier coverage (ACMNew York, NY, USA, 2007), pp. 63–74.
K Santosh, Hwang Ten-L, A Anish, Barrier coverage with wireless sensors. Wireless Netw. 13(6), 817–834 (2007).
Institute Information Sciences, NS-3 network simulator. (2008) Software Package www.nsnam.org.
MM Islam, M Ahasanuzzaman, MA Razzaque, MM Hassan, A Alamri, in Wireless and Mobile, 2014 IEEE Asia Pacific Conference on. A distributed clustering algorithm for target coverage in directional sensor networks (Bali, Indonesia, 28–30 August 2014), pp. 42–47.
Y Zuoming, T Jin, B Xiaole, X Dong, J Weijia, Connected coverage in wireless networks with directional antennas. ACM Trans. Sen. Netw. 10(3), 51:1–51:28 (2014).
C Yanli, L Wei, Li X-Y, Li Minglu, in INFOCOM. Target-oriented scheduling in directional sensor networks (IEEEBarcelona, Spain, 2007), pp. 1550–1558.
E Asma, R Abdur, Mohammad H Mehedi, A Ahmad, A Atif, Moving target tracking through distributed clustering in directional sensor networks. Sensors. 14(12), 24381–24407 (2014).
N Fernaz Narin, S Selina, R Abdur, I Shariful, in Int’l Conf on Networking Systems and Security (NSysS), Dhaka, Bangladesh. A duty cycle directional MAC protocol for wireless directional sensor networks (IEEE, 2015).
M Hosein, S Shaharuddin, AbdulI Samad, A learning automata-based solution to the priority-based target coverage problem in directional sensor networks. Wireless Personal Commun. 79(3), 2323–2338 (2014).
L Zaixin, WW L i, in Networking, Sensing and Control (ICNSC), 2014 IEEE 11th International Conference on. Approximation algorithms for maximum target coverage in directional sensor networks (Miami, Florida, USA, 7), pp. 155–160.
Ying-C Chih, Chih-W Yu, Distributed clustering with directional antennas for wireless sensor networks. Sensors J IEEE. 13, 2166–2180 (2013).
L Kezhong, X Ji, A fine-grained localization scheme using a mobile beacon node for wireless sensor networks. JIPS. 6(2), 147–162 (2010).
AA Prudius, Adaptive Random Search Methods for Simulation Optimization (Georgia Institute of Technology, Atlanta, Georgia, USA, 2007).
JC Spall, Introduction to, Stochastic Search and Optimization: Estimation, Simulation, and Control (Wiley, New York, 2003).
MM Rashid, MM Alam, MA Razzaque, CS Hong, Congestion avoidance and fair event detection in wireless sensor network. IEICE Trans. Commun. 90(12), 3362–3372 (2007).
WB Heinzelman, AP Chandrakasan, H Balakrishnan, An application-specific protocol architecture for wireless microsensor networks. Trans. Wireless. Comm. 1(4), 660–670 (2002).
Acknowledgements
The authors would like to extend their sincere appreciation to the Deanship of Scientific Research at King Saud University for its funding of this research through the Research Group Project no. RGP-VPP-281.
Author information
Authors and Affiliations
Corresponding author
Additional information
Competing interests
The authors declare that they have no competing interests.
Rights and permissions
Open Access This article is licensed under a Creative Commons Attribution 4.0 International License, which permits use, sharing, adaptation, distribution and reproduction in any medium or format, as long as you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons licence, and indicate if changes were made.
The images or other third party material in this article are included in the article’s Creative Commons licence, unless indicated otherwise in a credit line to the material. If material is not included in the article’s Creative Commons licence and your intended use is not permitted by statutory regulation or exceeds the permitted use, you will need to obtain permission directly from the copyright holder.
To view a copy of this licence, visit https://creativecommons.org/licenses/by/4.0/.
About this article

Cite this article
Islam, M.M., Ahasanuzzaman, M., Razzaque, M.A. et al. Target coverage through distributed clustering in directional sensor networks. J Wireless Com Network 2015, 167 (2015). https://doi.org/10.1186/s13638-015-0394-2
Received:
Accepted:
Published:
DOI: https://doi.org/10.1186/s13638-015-0394-2