
Abstract
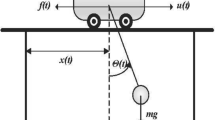
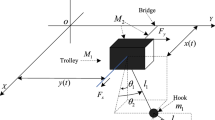
In this paper, a fuzzy logic controller is designed and proposed for controlling load swing of an overhead crane. To consider a complete model of the plant, the quadratic derivative of state variables is added to the conventional model which causes an extra weighting. The aim of the controller designed is to keep the load angle (ϕ) zero, all the time, which means no physical swinging in the load’s position. The results obtained are compared with the optimal control method, as one of the well-known control techniques, to verify the designed controller. The results show that the designed fuzzy controller is able to dampen the oscillations in the load swing angle and load’s angular velocity, in a reasonable time.






Similar content being viewed by others

References
Ko A, Lau HY, Lau T (2004) Artificial immune systems. Springer, Berlin, pp 91–105
Rahmani R, Tayyebi M, Majid M, Hassan MY, Rahman H (2011) IEEE on applied power electronics colloquium (IAPEC), 2011, pp 165–169
Rahmani R, Othman MF, Shojaei AA, Yusof R (2014) Static VAR compensator using recurrent neural network. Electr Eng 96(2):109–119
Rahmani R, Yusof R, Seyedmahmoudian M, Mekhilef S (2013) Hybrid technique of ant colony and particle swarm optimization for short term wind energy forecasting. J Wind Eng Ind Aerodyn 123:163–170
Bartolini G, Pisano A, Punta E, Usai E (2003) A survey of applications of second-order sliding mode control to mechanical systems. Int J Control 76(9–10):875–892
Liu R, Li S, Chen X (2013) IEEE control conference (CCC), 2013 32nd Chinese, pp 2195–2200
Kodani N, Ouchi S, Todaka Y (2003) IEEE SICE 2003 annual conference, vol. 2, pp 1860–1863
Wang Z, Surgenor BW (2006) A problem with the LQ control of overhead cranes. J Dyn Syst Meas Control 128(2):436–440
Moon SC, Lee WG, Lee SG (2013) Adaptive sliding mode control of overhead cranes with varying cable length. J Mech Sci Technol 27(3):885–893
Prommaneewat K, Roengruen P, Kongratana V (2007) IEEE international conference on control, automation and systems, 2007. ICCAS’07, pp 1954–1957
Trisuwannawat T, Tirasesth K, Iida M, Komine N, Ochiai Y (2000) Derivative state constrained optimal H2 control for oscillatory systems and its application. IEEJ Trans Ind Appl 120(6):775–781
Eltohamy KG, Kuo CY (1998) Nonlinear optimal control of a triple link inverted pendulum with single control input. Int J Control 69(2):239–256
Huang SJ, Huang CL (2000) Control of an inverted pendulum using grey prediction model. IEEE Trans Ind Appl 36(2):452–458
Shojaei A, Othman MF, Rahmani R, Rani M (2011) IEEE fifth UKSim European symposium on computer modeling and simulation (EMS), 2011, pp 83–87
Auernig JW, Troger H (1987) Time optimal control of overhead cranes with hoisting of the load. Automatica 23(4):437–447
Zadeh LA (1996) Fuzzy logic = computing with words. IEEE Trans Fuzzy Syst 4(2):103–111
Rahmani R, Mahmodian M, Mekhilef S, Shojaei A (2012) IEEE student conference on research and development (SCOReD), 2012, pp 109–113. doi:10.1109/SCOReD.2012.6518621
Rahmani R, Seyedmahmoudian M, Mekhilef S, Yusof R (2013) Implementation of fuzzy logic maximum power point tracking controller for photovoltaic system. Am J Appl Sci 10(3):209–218
Rahmani R, Langeroudi N, Yousefi R, Mahdian M, Seyedmahmoudian M (2014) Neural Comput Appl 25(3–4):879. doi:10.1007/s00521-014-1561-9
Ustuntac T, Şahin AD (2008) J Wind Eng Ind Aerodyn 96(5):611. doi:10.1016/j.jweia.2008.02.001
Lima F, Kaiser W, da Silva IN, de Oliveira Jr, AA (2014) Appl Soft Comput (0). doi:10.1016/j.asoc.2014.03.044
Mozaffari A, Behzadipour S, Kohani M (2014) Appl Soft Comput 14(Part A0):12. Special issue on hybrid intelligent methods for health technologies. doi:10.1016/j.asoc.2013.09.023
Liu D, Yi J, Zhao D, Wang W (2005) Adaptive sliding mode fuzzy control for a two-dimensional overhead crane. Mechatronics 15(5):505–522
Precup RE, Filip HI, Rdac MB, Petriu EM, Preitl S, Drago CA (2014) Appl Soft Comput. doi:10.1016/j.asoc.2014.01.013
Benhidjeb A, Gissinger GL (1995) Fuzzy control of an overhead crane performance comparison with classic control. Control Eng Pract 3(12):1687–1696
Lee CC (1990) Fuzzy logic in control systems: fuzzy logic controller. IEEE Trans Syst Man Cybern 20(2):419–435
Castro JL (1995) Fuzzy logic controllers are universal approximators. IEEE Trans Syst Man Cybern 25(4):629–635
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Ranjbari, L., Shirdel, A.H., Aslahi-Shahri, M. et al. Designing precision fuzzy controller for load swing of an overhead crane. Neural Comput & Applic 26, 1555–1560 (2015). https://doi.org/10.1007/s00521-015-1825-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-015-1825-z